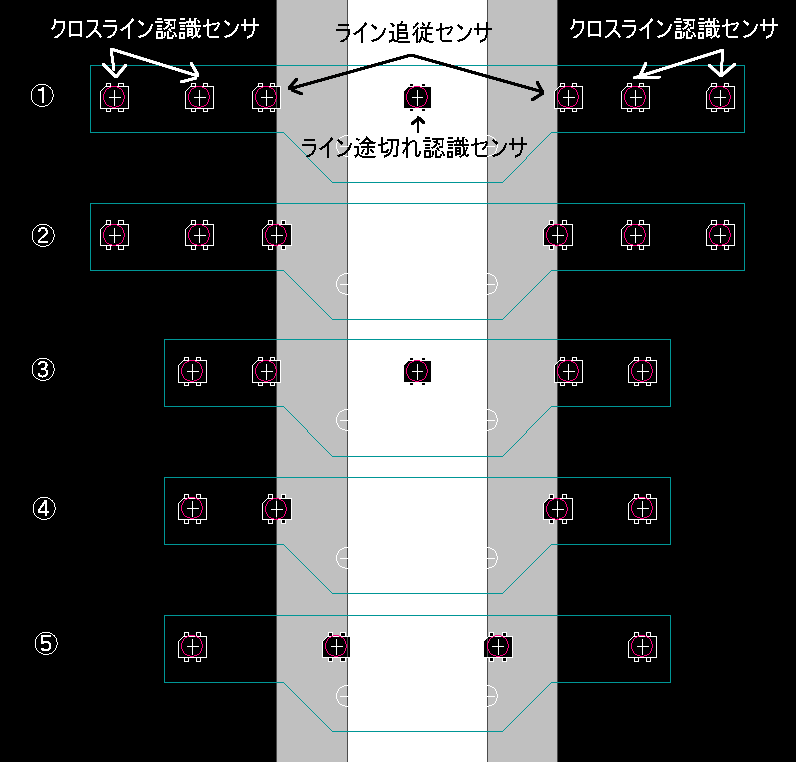
ここでは①の外側4つのセンサ(クロスライン認識に用いる)をクロスライン認識センサ黒色と灰色の境目付近にあるセンサ(ライン対重要に用いる)をライン追従センサ白線上にあるセンサ(ラインの途切れ認識に用いる)をライン途切れ認識センサと呼びます。
センサ上の赤丸は、そのセンサが認識できる範囲を示し、赤丸の外側での出来事をセンサは認識できません。
①のセンサの配置は全てのセンサの仕事を分けることでライン追従、クロスライン検出、ライン途切れ検出を確実に行うことができます。
②のセンサ配置は①のライン途切れ認識センサの役割もライン追従センサが担っています。二つのライン追従センサで黒色が認識されるとラインの途切れと判定します。しかし、この配置ではライン認識センサのラインのとのズレ量の把握できる範囲は①のソレと比べて1/2になります。
③のセンサ配置は①のクロスライン認識センサの内の内側2個の役割をライン追従センサが担っています。ライン追従センサで白色が認識されるとクロスラインと判定します。
④のセンサ配置は①のライン途切れ認識センサの役割とクロスライン認識センサをライン追従センサが担っています。二つのライン追従センサで黒色が認識されるとラインの途切れと判定し、ライン追従センサで白色が認識されるとクロスラインと判定します。しかし②と同様にズレ量の把握できる範囲が狭くなっています。
⑤のセンサ配置は③と同じように①のライン途切れ認識センサの役割とクロスライン認識センサをライン追従センサが担っています。二つのライン追従センサで黒色が認識されるとラインの途切れと判定し、ライン追従センサで白色が認識されるとクロスラインと判定します。③とは違いズレ量の把握できる範囲は①のソレと同じです。
※コメントのエラー修正しました。