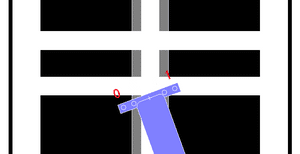
ハーフライン検出処理へ展開するために変更したクロスライン検出処理。
これまでは左右のセンサが共に反応した場合にクロスラインと判定していたが、上図の場合には検出できない可能性がある。
この問題を解決するために導入したルールは、
片方のセンサが反応してから一定時間内にもう一方のセンサが反応したらクロスライン
というものである。ここでの一定時間はセンサ部分の振動周期やクロスラインを通過する時間を考慮して決定した。
このルールを適用したロボットは今のところ、誤検出もなく安定してクロスラインを検出できている。
ハーフラインの検出方法が考え付きません。