
件のモータドライブ回路の構成を公開する
A3941+IRF8915の構成で、PWM周期40kHzで駆動させている。
allegroのA3941はフルブリッジFETドライバ。
PWMと回線方向とフリーの3本の信号を入力するだけで、
Nch構成のHブリッジを動かしてくれる便利なIC。
デットタイムは外付け抵抗で調整可能。
IRF8915はNchFET2個入りで、
片側18.3mΩで8.9A流せる。
ゲート容量も小さいのでスイッチング速度も上げれる。
リクエストがあれば定数も書きます。
リクエストあったので定数も公開

(A3941データシートより)
・RESET端子はマイコンの電源と同じにする。
・FF1とFF2端子は、GNDに落としても良いかもしれない(未検証)
・FREEは使ってないので、動作未検証(→TypeS等のFREEと挙動が異なる@2015年2月)
////////////
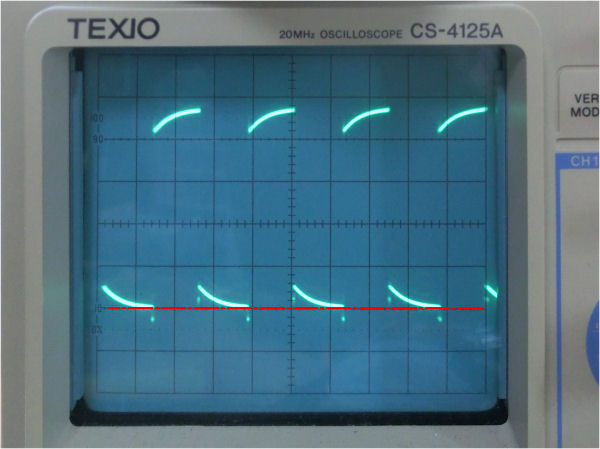
追記 PWM40kHz付近でのモータ両端電圧波形
BREAKモード(SR=H)
FREEモード(SR=L)
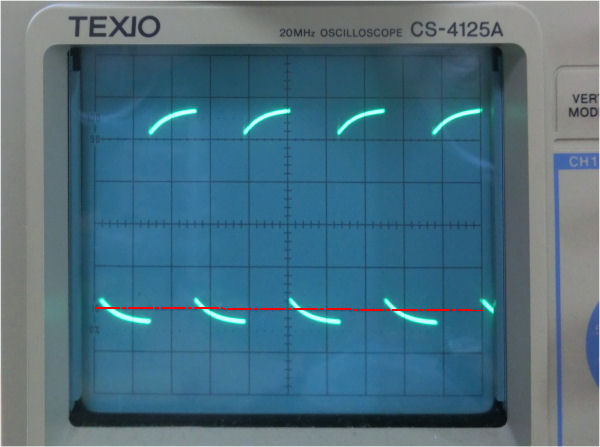
PWMがLの区間での電圧がマイナス方向に触れている。
内部のダイオードの電圧降下分か?
これにより同一duty時にはFREEの方がモータの回転速度は遅い
/////////////
追記
FREEの動作について
モータドライブ基板TypeS等のFREEはPWMのOFF時間はモータ端子が開放されれ逆起電流は流れないが、このモータドライバでは電流が流れるので振る舞いが異なる
/////////////
PWMOFF時間中にFETのボディダイオード分の逆電圧(0.7V位?)が掛かって回転が阻害されるのならば、そのFETに並列にVfの小さいダイオードを付ければ改善されるはず。
ということでショットキーを付けてみる
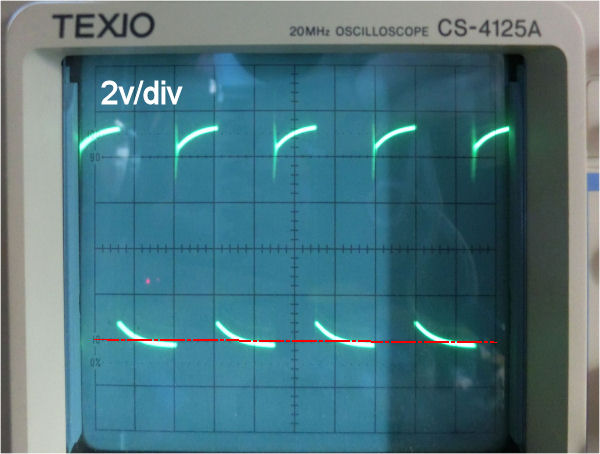
OFF区間中の逆電圧が小さくなり、回転数も上がった。
FREEモードを使うのは正転時だけだから部品追加は1個ですむ。
ただ、スイッチング時のスパイクが増えたのは気持ち悪い。



{kind=link}
{kind=link}