前回違いが分からなかった補助ヨークによるモータ出力の変化について、再チャレンジしてみた。
今回のモータの静止トルクを比較する。
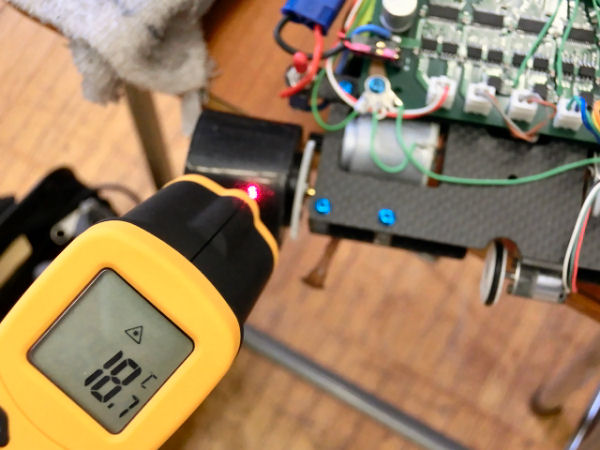
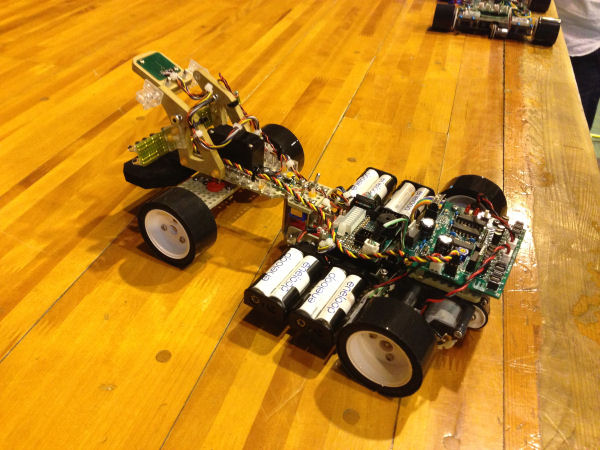
測定環境は上の写真通りで、安定化電源を用いてモータを1.0A定電流駆動させ、その時のレバー端(ピニオン+長ねじ)に掛かる力を測定する。測定結果にはレバー自体の重さ(約1g)が含まれる。n=2

補助ヨークの種類としてはパーマロイ薄板を幅20mmにカットしたものと、スプレー缶を再利用した0.25m厚の鉄版を16mm幅にカットしたもの、およびそれを2重でモータに巻きつけた物の3パターンで比較する。
モータ内部のコアの位相によりトルクの変動があるため45度づつモータを回転させて計8ポイントで測定した。
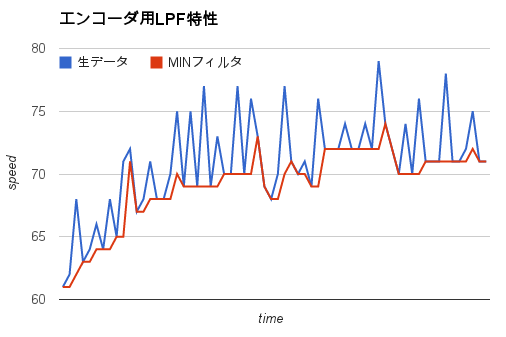
で、測定結果は以下のグラフ
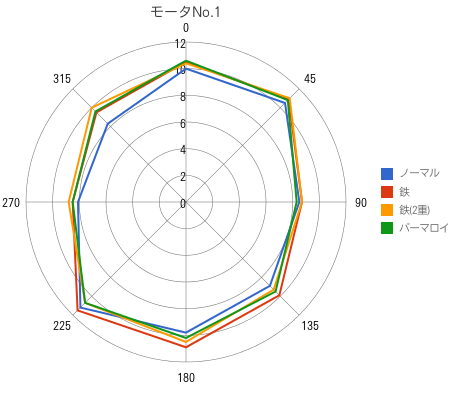
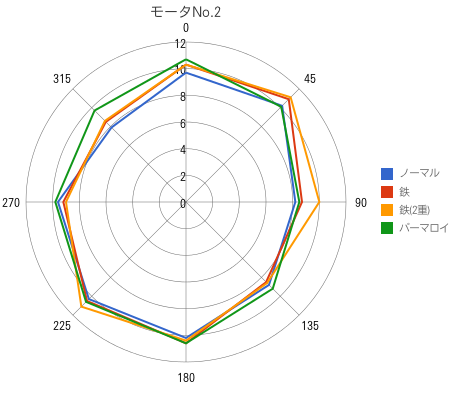
円の外側に行くほどトルクが大きいことになる。
考察するならば
・補助ヨークにより5%程度はトルクアップする。
・鉄版の1重と2重での差がないことから、もっと薄い板でも良いかもしれない。