
注文した商品が届き始める。トラ技CPLDに使用する正方形クリスタルも手に入った。
月: 2006年6月
毎日こつこつ
今までは物を注文する際に送料を少なくするために、できる限り商品金額が多くなってから注文するようにしていたが、これもやり過ぎは良くないようで、現物がない状態ではモチベーションが上がりにくい。
ということで少しばかり商品を発注。若干の送料増加は気にしないでおこう。
毎日こつこつ
目が疲れたので今日はココまで。正直メイン基板に飽きてきた。他の基板を考えたい。
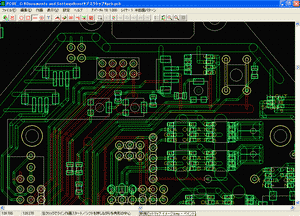
配線3
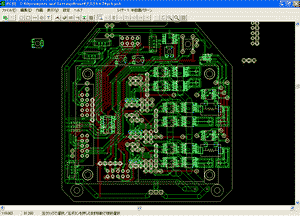
両面基板用にパターンを引き直す。片面で設計の時には入らなかった素子も実装できそうである。
後は電源周りを書き上げれば一応設計完了となるので、この基板だけでも今月中に終わらせる。
コース作成6

久々の作業&更新。
黒色のカッティングシートを貼った後に放置してきたレースチェンジ部分のコースを仕上げる。
6月に入ってから体調が良くない日が多い。最も重要なインフラは体である。
コースアウト時の処理
ロボットがコースアウトした後、壁や物に衝突してしまうとギヤの破損やFETの炎上といった被害をこうむる恐れがある。被害を最小限にするために、コースアウト直後にロボットの動きを止め衝突を回避することが必要となる。
動きを止める動作は速度や加速度を無くす処理を行えば良い。
コースアウトを判定する方法は多くあるだろうが、単純な処理で誤作動のない物が求められる。
私が使用しているコースアウト判定方法は以下の3つ。
1.通常走行時(クランクやコースチェンジでない)で一定時間加速しても速度が遅い。
2.全ての走行時において一定時間以上ステアリングを片方に切り続けている。
3.全ての走行時において一定時間以上ラインセンサの値が変化しない。
コースアウトしたら終わりだからそんな処理は要らない(そんなふうに考えていた時期がありました)。というような考え方もあるだろうがサイフや時間を考えると必要である。
5月は目に見える形では作業がほとんど進まなかった。6月中には回路を終わらせたい。