以前書いていたメモを読んでいると
コースチェンジはオフセット
というメモ書きを発見した。下図のような事を考えていたようだ。
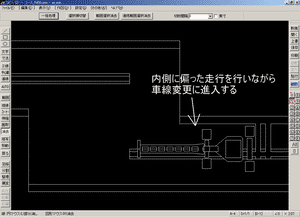
車線変更では予め内側を走行している方が容易に走行できそうであるが、50cm程度でロボットの位置をずらせるかどうかが疑問であるし、位置をずらしている過渡状態でロボットがラインに対して傾いた場合にどう対処すればいいかも分らない。
しかし面白そうなので実装を目指す。20mm程度オフセットできるようにセンサ配置を再び考える。
以前書いていたメモを読んでいると
コースチェンジはオフセット
というメモ書きを発見した。下図のような事を考えていたようだ。
車線変更では予め内側を走行している方が容易に走行できそうであるが、50cm程度でロボットの位置をずらせるかどうかが疑問であるし、位置をずらしている過渡状態でロボットがラインに対して傾いた場合にどう対処すればいいかも分らない。
しかし面白そうなので実装を目指す。20mm程度オフセットできるようにセンサ配置を再び考える。