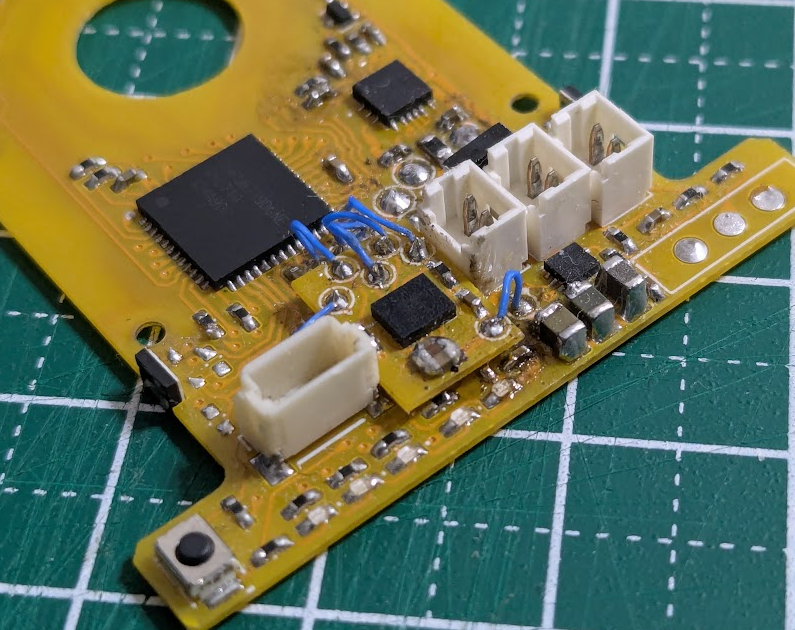
Training Tracer Ver.2の機体の仕様を知らずにHardware Blocksetを使って躓いたところ
→TrainingTracer_V3では0.1uFが追加されている
Training Tracer Ver.2の機体の仕様を知らずにHardware Blocksetを使って躓いたところ
→TrainingTracer_V3では0.1uFが追加されている
Training Tracer Ver.2のソフトをsimulinkで書く場合、Embedded Coder Support Package for STM32が必須になる。
Embedded Coder Support Package for STM32のセットアップ時には、さらに別のソフトのインストールを求められて戸惑った。
①ARM Compiler
コンパイラーを別途ダウンロードする必要があり、アカウントの作成も必要になった
②STM32CubeMX
STM32マイコンのプリフェラル設定そのコードを出力するソフト、ダウンロードにはSTMのアカウント登録が必要で、MATLAB上からそのソフトを動かすにはソフト上でのログインが必要
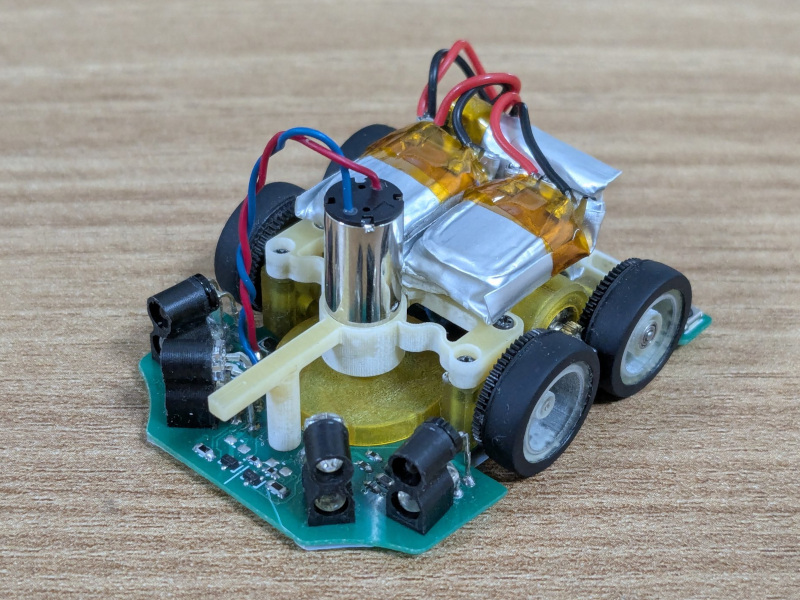
2025年大会用に開発してたけど運動性のが悪くお蔵入りした機体。
マイコンをRX631からRX671に変更してスマートコンフィギュレーターのコードを利用するソフト開発に移行したのと、バッテリを3セル構成にして高速域での加速性能向上、機体ヨー慣性を減らしてターン速度を上げようと試みた。しかし、左右のターン特性が大きく異なるのと、ターンの再現性が低く大会には持ち込めなかった
吸引力不足もMK07-3.3を10V駆動で使っても、同じファンをCL-0614-10250-7の6.5V駆動に比べて吸引力が劣っていた。
また、ジャイロを別基板にして振動を逃がす構成にチャレンジするも、ジャイロ子基板を固定する両面テープの面積を小さくしすぎて、基板間のワイヤーの張力にスポンジが負けて水平に設置できなかった

大会を運営してくださった皆様ありがとうございました
運よく5回完走でき3位入賞と、マイクロマウスタックチャンでも特別賞を頂きました
試走日の土曜日は試走時間のロスタイムに駆け込み何度か探索走行を確認。探索していると変なところでターンして壁にぶつかる。撤収前に一度だけ発生時の様子を録画することができたのでマウスパーティに向かう。
その夜に録画とプログラムを見返していると、右ターン中に左壁の壁切れの検出を無効にしそびれていて、その影響で直線に入った直後に壁切れが起きたとして距離補正が誤動作していた。ただし、このバグは2023年から入っていたようなので、今までは運よくターン中の壁の反射が低くて壁切れ条件を満たしておらず、処理が漏れていても問題なかったのが、今回の大会環境では壁の反射量が大きかった為に壁切れ判定が動作して露呈したようだ
大会本番、出走順が真ん中くらいだと全面探索した人が少なくて誰も走っていない箇所を走るとタイヤへの埃の付着が多い。ちょっとオートスタートは厳しいかなと思っていた矢先にリタイヤ。それでもほぼ全面探索ができており、最短経路ではないけれどそこそこいい経路までは取得できていた。
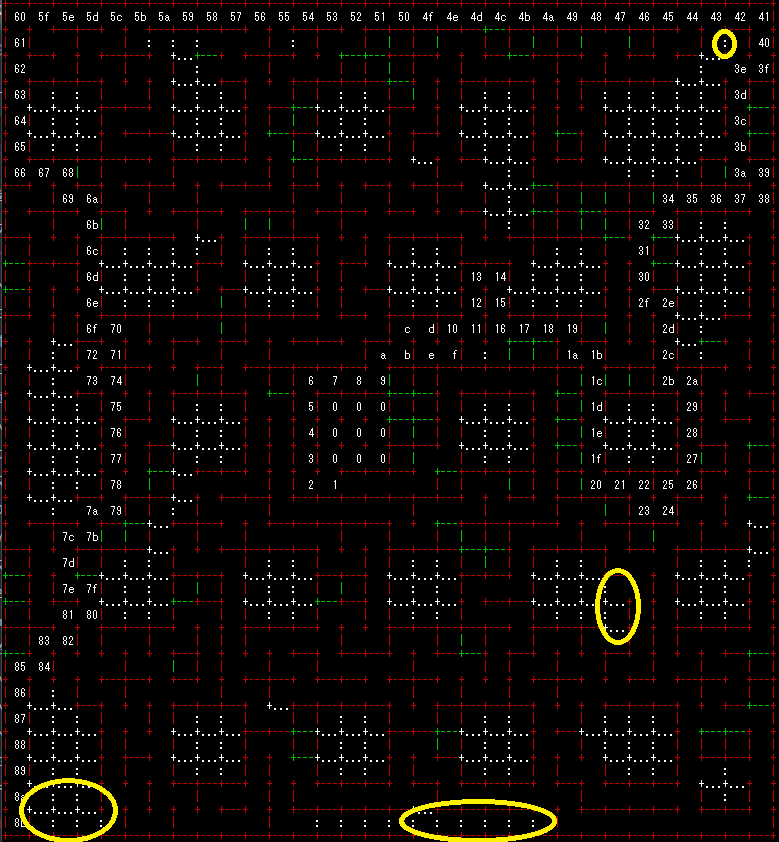
黄色が最短経路候補の未探索区間。
2~4走目は直線速度、加速度、ターン速度の様子を見ながら走行して5走目は最大パラメータで完走できた。
直線速度6.5m/s,直線加速度40m/ss~20m/ss,斜め速度5m/s,斜め加速度30m/ss~20m/ss,90°ターン2m/s,180°ターン1.8m/s,その他が1.7m/s。ターンの最低速度は去年よりも0.1m/s速いが、数字上同じの加速度は去年よりもリミットを早めにかけているので遅いし、電圧不足で最大速度まで到達していたかも不明。
素晴らしい大会を運営してくださった皆様、ありがとうございました。
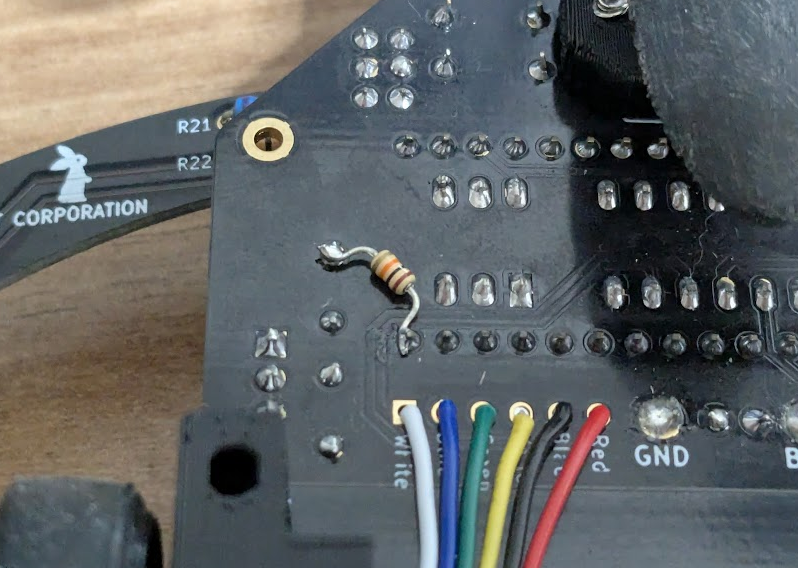
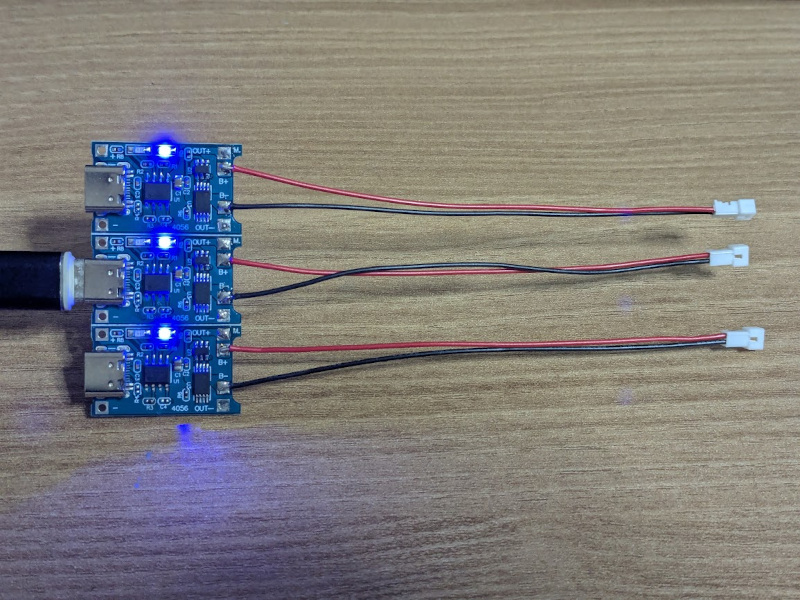
①ファームウェアの書き込み中に左モータが回転する。
書き込み中にプルアップされるポートがモータ制御用に割り当てられているため。上の写真のようにプルダウン抵抗をつけると良い
→TrainingTracer_V3では10kΩのプルダウン抵抗が追加されている
②パワースイッチをONにしないと書き込みができない
マイコンボードにUSBを繋ぐとマイコンボード上のLEDが点灯するため、一見書き込みができそうに思えるが。この状態ではSTMマイコンに通電しておらず書き込みできない
資料が複数サイトにあって迷うので備忘録
RT社
Training Tracer Ver.2 Download Contents
組み立てマニュアル、Arduinoサンプルスケッチ
GitHub – rt-net/TrainingTracer_V2_Hardware: Training Tracer Ver.2のハードウェア資料です
CPUボードの改造箇所、回路図
MathWorks社
Line Trace for Micromouse with Simulink – File Exchange – MATLAB Central
Simulinkのモデル
GitHub – mathworks/Line-Trace-for-Micromouse
同上、MATLAB環境構築方法など
How to Make a Line-Following Robot Using STM32
解説動画
マイクロマウスで学ぶ!ロボティクス開発 × モデルベースデザイン入門
54分30秒~解説