バッテリ残量やタイヤの磨耗具合はタイムに大きな影響を及ぼさないが、ウィングを外すと少し速く走れる。重量か空気抵抗か?どちらにせよ”げんかつぎ”の意味合いが大きいので付けていく。
イマイチな状態だが、今年はココまで。
・シャフトのDカットの徹底
・整備製の向上
・リセット対策の検証→今日もリセットの発生なし
バッテリ残量やタイヤの磨耗具合はタイムに大きな影響を及ぼさないが、ウィングを外すと少し速く走れる。重量か空気抵抗か?どちらにせよ”げんかつぎ”の意味合いが大きいので付けていく。
イマイチな状態だが、今年はココまで。
・シャフトのDカットの徹底
・整備製の向上
・リセット対策の検証→今日もリセットの発生なし
昨日と同じセットのタイヤだけを張り替えた状態で走行させる。グリップが良くなることでホイルスピンやアンダーステアが減少したが、タイムの伸びは誤差程度しか現れなかった。
・タイヤ磨耗の影響をチェック
・車線変更区間脱出処理の変更
・リセット対策の検証→今日もリセットの発生なし
・シリコンシートの切り出し→シリコンシートの手持ち在庫が切れた
6週間ぶりに作業を再開する。
ここ一番でのパフォーマンスと、安定性を高次元で両立できたら素晴しい。が難しい。試走が許されない全国大会では安定性を重視する。
車線変更の処理を変更する。これまでは車線変更からの脱出速度優先していたが、最短距離でホームポジション?に復帰することを目標とした。車線変更中の走行速度落として、復帰ラインへの進入角度を増す。タイムが悪化するだろうがキニシナイ。
・車線変更処理変更
・坂道頂上でブレーキランプが点灯しなかった問題を解決
・クランク脱出時の加速するポイントを変更→おそらく変化なし
・バッテリ容量低下&タイヤ磨耗状態のセットのままで、充満状態バッテリで走行
・リセット対策の検証→今日はリセットの発生なし。
駆動力はロボットの加速・減速性能だけでなく、旋回性能にも影響を与える。
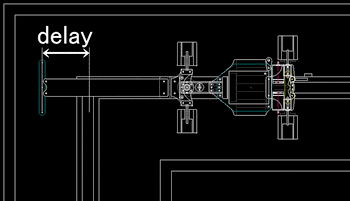
同期型PWMを用いて駆動系とRCサーボを制御すると、RCサーボの制御周期に駆動モータが引きずられるため、RCサーボの制御周期と同じ遅延が駆動系にも発生する。
クランクや車線変更のように急速にロボットの進行方向を変える場面では、この駆動系の無駄時間による旋回性能の劣化が問題となる。
この問題は、自作サーボやデジタルRCサーボの導入による制御周期の短縮によって対処されるが、アナログサーボを使用する場合には他の解決方法が必要となる。
モータドライブ基板(Vol.3)+アナログサーボ環境での解決案
・リセット同期PWMを止め、独立したPWMによってRCサーボや駆動系を制御する。
ITU0~2を用いてRCサーボと駆動系の制御周期を分けることで、駆動系の遅延を減少させる。
実装上では、ITU0~2でPWMを発生させるためのプログラムの変更や、モータドライブ基板(Vol.3)を接続するポート及び接続コネクタの結線の変更等が必要となる。
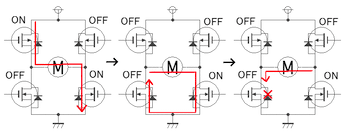
駆動モータをFreeで回した場合に、加速が鈍いと言われていた点は
帰還ルートを寄生ダイオードだけに頼らず、ダイオードを追加することで改善できそうだ。
/////////////////
2018/8/20 追記
Basicマシンにおいて、Duty100%で走った場合
BreakよりもFreeのほうが、速度が出るという事実がある。
これは、PWM duty100%設定でも実際には99.x%のON dutyにしかならず、
その若干のOFF duty時間中に、Breakで逆転ブレーキがかかるか、
Freeで加速が止まる程度で済むかの差から着ている。
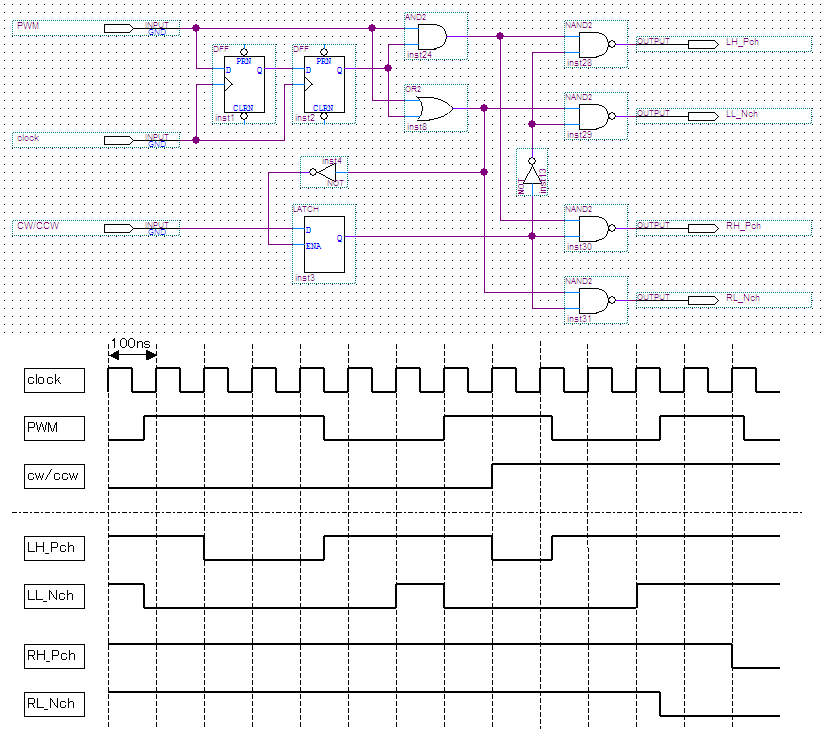
モータドライブ回路を描く
・デットタイムは100ns以上
・clockには10MHzを入力
・各出力は非反転ゲートドライバを通してFETに接続
ピン・アサインの設定はしていないが、コンパイルは通った。
ゲート遅延を無視すると、下のようなタイミングチャートになるでしょうか?