駆動モータが傷んでくると速度計測用のエンコーダの値にノイズが載るようになる。
5ヶ月位使っているモータのせいなのか、エンコーダへのノイズが増えてきた。
4m/s付近から異常に大きな値がでるようになって、その値によるFBのせいで目標速度より低い速度で走ってしまう。
モータを新品に換えるべきなのは間違いないが、そのまえにエンコーダによる速度計測にフィルタを入れてみる。
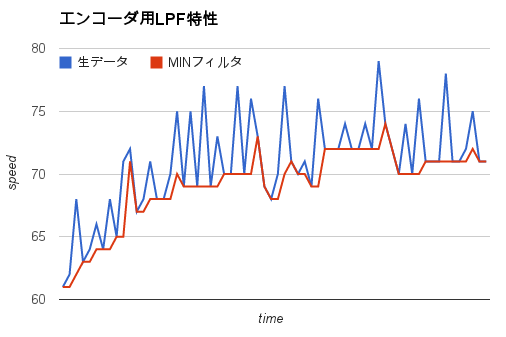
このノイズ(グラフ青線)の特徴は
・出鱈目な値
・+方向のみっぽい
・たまに入る
なので、エンコーダ信号の2サンプル分の値の小さい方(グラフ赤線)を使用する事にしてみる。
最大でも1サンプル分の遅延なので速度制御にも影響なし。
しばらく様子見をする。
月: 2014年12月
ポロンの特性
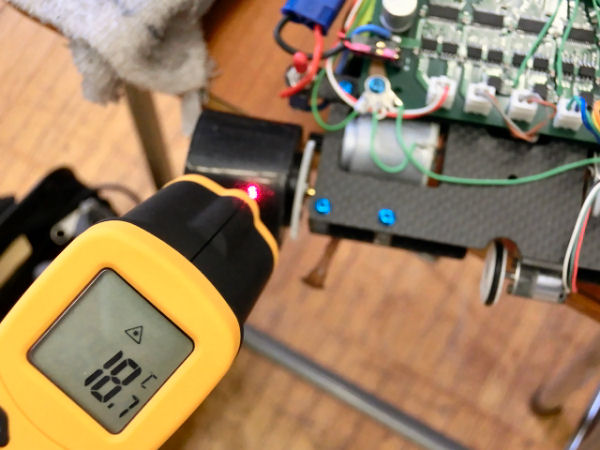
放射温度計によるタイヤ表面温度の測定、室温よりも3度ほど高く測定される。
ここ数年、タイヤのスポンジ材にPORON SR-S-24Pの3mm厚を利用している
柔らかいスポンジだが圧縮による残留歪が非常に小さいため、使っているうちにタイヤがヘタることがなく、20ヶ月程度前に作ったタイヤは今も問題なく使えている。
が、しかし、一点どうしようもない弱点があり
低温時には弾性が下がりタイヤが硬くなってしまう。
硬さの感じも単にガチガチになるのではなく、一度変形すると復元するまでに時間がかかるようになる。
経験上、室温が15度以下になるとグリップは期待できない。
冬場に使うにはエアコン環境が必須となる。
※その前はPORON LE-20の5mm厚を使用していた。LE20のほうが低温時の硬さ変化は小さい。
※スポンジは痛まないが、最終的にはサポート材とスポンジ間が裂けることで壊れる。

可変長センサアーム
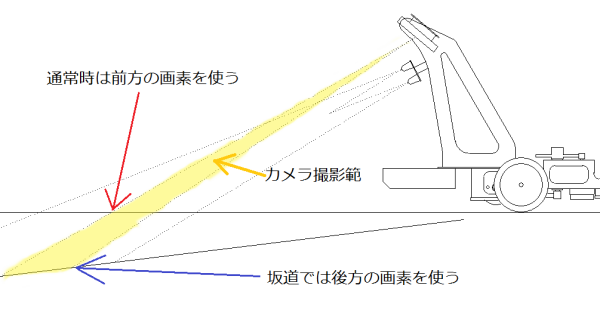
センサーアームは長いほど良いが、カメラ誘導ロボットでセンサーアームを伸ばせない(遠くの画像を使えない)理由の一つに坂道頂上で撮影角度が浅くなりコースを撮影できなくなることが挙げられる。(scitecsmcrさんも指摘している)
今回はそれを助ける実装。
ライントレースに用いる画像ラインを自動で選択するようにする。
まずは最も前方を撮影しているラインを計算に使用する。
最前方のラインでコースを見失った場合には、後方(手前)を撮影しているラインを用いて白線の検出を試みる。
こうすることで、坂道の頂上付近では自動的に手前の画像を用いてライントレースすることになる。手前の画素ほどコースとの撮影角度が深くて照明の反射が強くなるため、コースを見失いにくくなる。