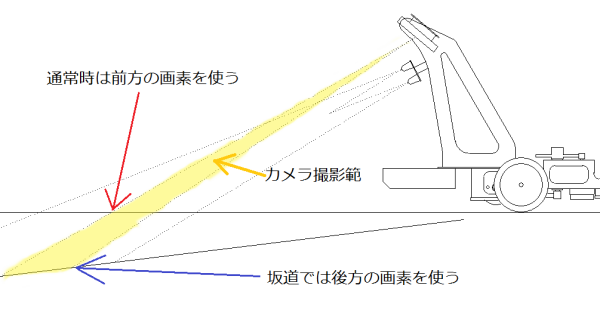
センサーアームは長いほど良いが、カメラ誘導ロボットでセンサーアームを伸ばせない(遠くの画像を使えない)理由の一つに坂道頂上で撮影角度が浅くなりコースを撮影できなくなることが挙げられる。(scitecsmcrさんも指摘している)
今回はそれを助ける実装。
ライントレースに用いる画像ラインを自動で選択するようにする。
まずは最も前方を撮影しているラインを計算に使用する。
最前方のラインでコースを見失った場合には、後方(手前)を撮影しているラインを用いて白線の検出を試みる。
こうすることで、坂道の頂上付近では自動的に手前の画像を用いてライントレースすることになる。手前の画素ほどコースとの撮影角度が深くて照明の反射が強くなるため、コースを見失いにくくなる。