直進中に、車体の角度と目標角度の差異が90度を超えた場合には駆動を切る。これにより、クラッシュした時に暴走を続けることを抑えることができる。
斜め走行中に、壁に近づき過ぎた場合には、車体の目標角度を壁から遠く方向にする。具体的には前センサと横センサのどちらか一方の値が閾値を超えた場合に目標角度を5度ずらす。
直進中に、車体の角度と目標角度の差異が90度を超えた場合には駆動を切る。これにより、クラッシュした時に暴走を続けることを抑えることができる。
斜め走行中に、壁に近づき過ぎた場合には、車体の目標角度を壁から遠く方向にする。具体的には前センサと横センサのどちらか一方の値が閾値を超えた場合に目標角度を5度ずらす。
熊本高専で行われた第30回マイクロマウス九州地区大会。
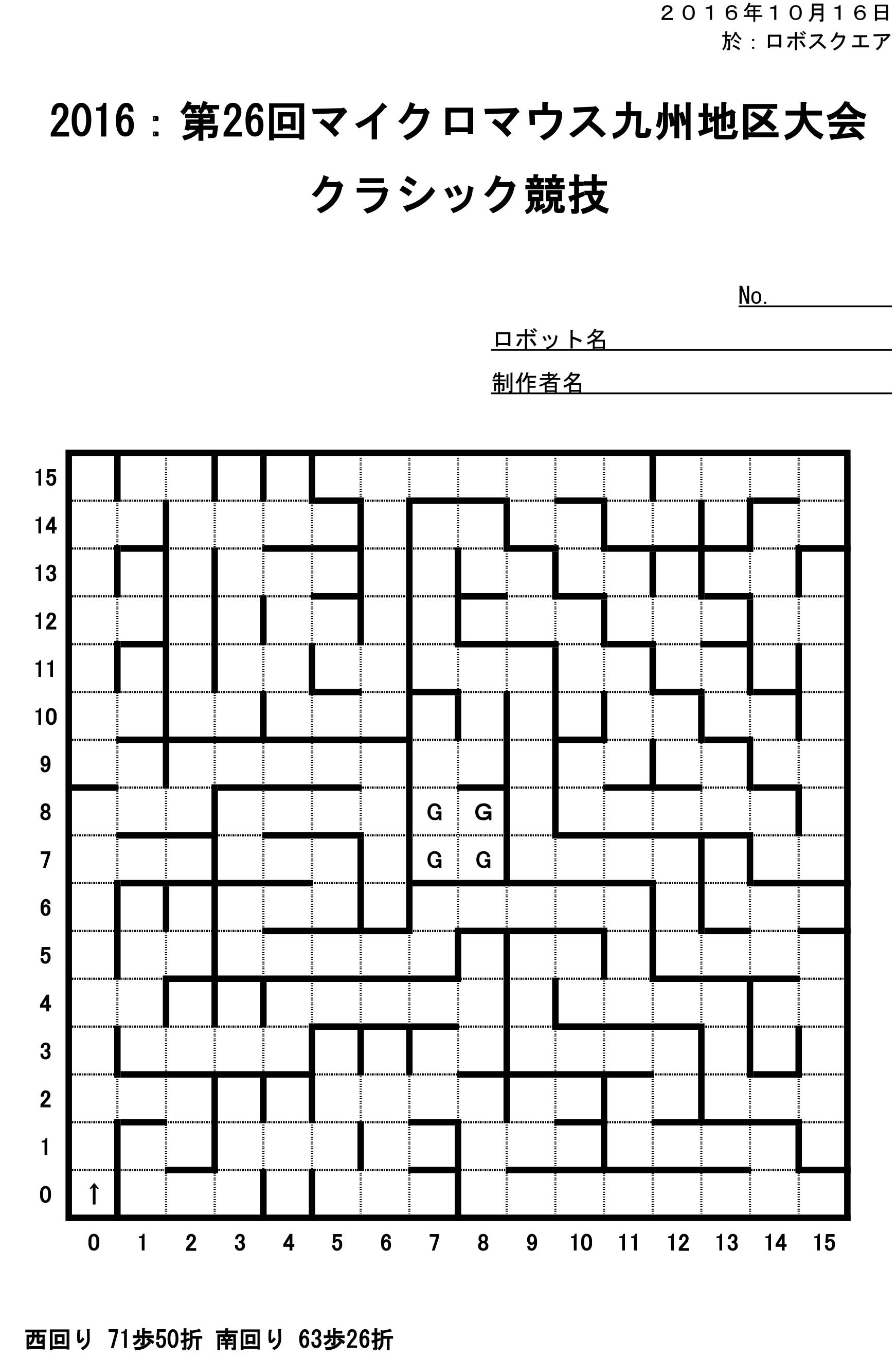
迷路レイアウトは過去の九州地区のクラシック迷路から くじ引きで選択された。
選ばれた迷路は2016年のレイアウトで、3本のある斜め区間が特徴的である。
大会結果は2位。昨日組み込んだ処理である斜め走行から脱出時の壁切れ補正が功を奏したようだ
リアルでの大会は2年ぶりで本当にありがたい。
大会を運営してくださった熊本高専の皆様ありがとうございました。
備忘録。明日は九州地区大会である。
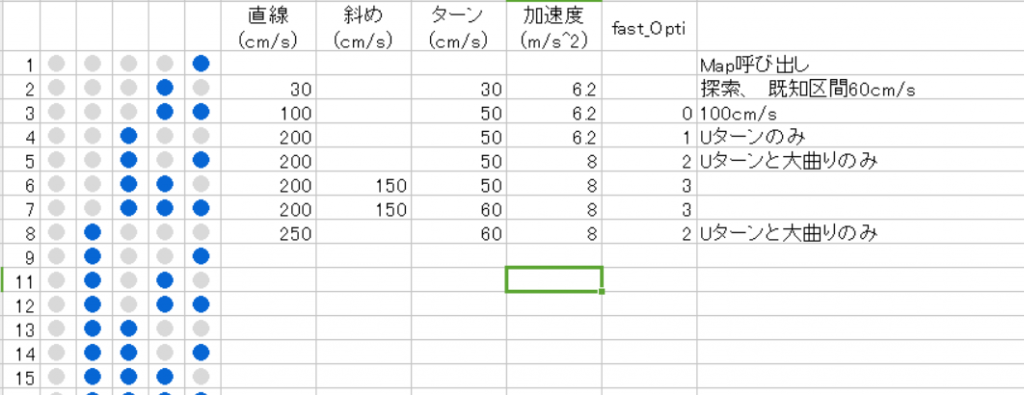
・パラメータのカンペを作成
・斜め走行からの出口での壁切れ検知を追加
今後の検討として、例えば直前がVターンの場合には、直前のターン中に壁切れが起きるため補正の距離がズレる。直前のターンの種類によって壁切れからの距離を切り替える処理があったほうが良さそう。
・メイン環境のデスクトップPCと遠征用のノートPCでシリアルポートのcom番号が異なるっていたのを修正(Renesas Flash Programmerの再設定の手間を減らす)
{kind=link}