
〇M5stack Japan Tour 2025 Spring Osaka
クラシック機体とハーフ機体の展示。表彰状を置くと見栄えがすることを学んだので今年は配置してみた
M5Stack社jimmyさんたちにマイクロマウスタックチャンを見てもらった。そして参考にしてくださっているようだ。
〇5月度練習会
既知区間直線の先に未知区間の直線があると座標がズレる不具合を直すつもりが、再現せず。
今回はだいぶ前のコードから復元したため、その後の更新でバグを作りこんでいたのか?それとも他の要因があるのか?
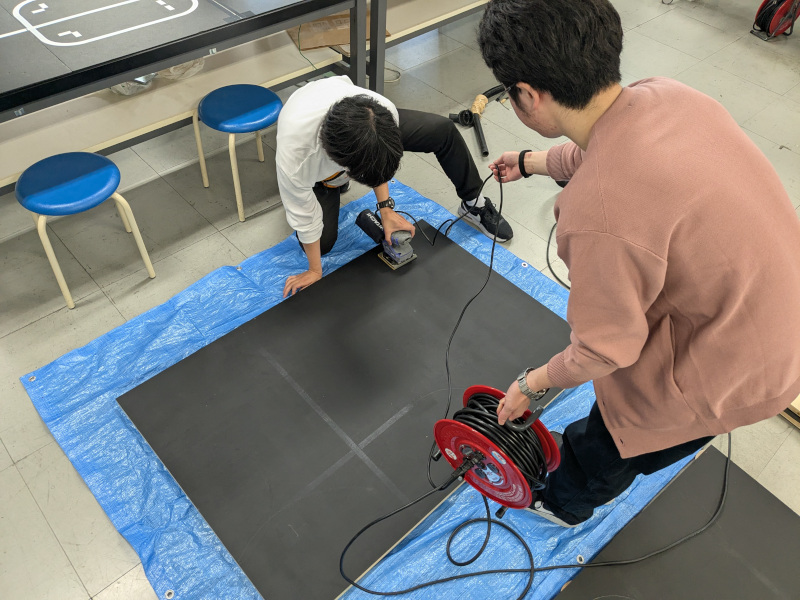
ロボトレーコースの表面の凹凸を#2000の紙やすりで削っている写真。
〇ベゼルが紫の直径8mm長さ20mmのモータ
端子間抵抗0.5Ω、インダクタンス2.2uH
参考LCRメータを買ってみた