鈴鹿に向けて大忙しの紀北工業さんへ
スイカウマイ
徐々にパラメータを開放させて、確認を進める
・左斜線変更の区間直後にコーナがある場合に対応できないバグを見つけて修正。
・よさげなピニオンを試してみる。あまり走行音は変わらないそう
・重いバッテリを求めて、エネループプロを組電池化をさせて頂く
ニッケルタブのスポット溶接はなかなか怖い
鈴鹿に向けて大忙しの紀北工業さんへ
スイカウマイ
徐々にパラメータを開放させて、確認を進める
・左斜線変更の区間直後にコーナがある場合に対応できないバグを見つけて修正。
・よさげなピニオンを試してみる。あまり走行音は変わらないそう
・重いバッテリを求めて、エネループプロを組電池化をさせて頂く
ニッケルタブのスポット溶接はなかなか怖い
春の大会以来、久々にマシンを搬送箱から出す。
管理を忘れていたバッテリは、予備も含めて故障していた。
さすがに未調整は不味いと、淀工さんに
半年ぶりに、操作方法を思い出して、走らすと
無事完走できて、まずは一安心。
次に動きを見ていると、何か音がおかしい。
右後輪が派手にトーアウトになっていた。
春の大会の大クラッシュ時にシャフトが曲がっていたようだ。
エンコーダを固定している樹脂バネも劣化していたようで
すぐに割れてしまった。予備を準備しとかねば。
最短走行できず。
まさかのゴール区間に壁を置いている。
斜め走行の調整より先に、探索をどうにかしないと。

急ぎ組み立てる
致命的なミスは無さそうだが
・ギヤボックスはPOMで作り直したい(壊れたら置き換える)
・ピニオンは厚さ1mm位で良い(要発注)
マイクロマウス関西支部総会がGW前に行われ
7月9日(日)に行われる関西地区大会の計画を立てる
完全に大会時季を忘れていた
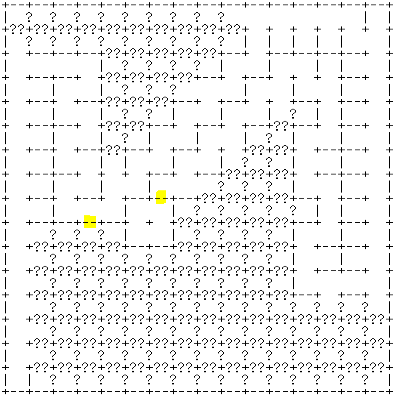
とにかく、32×32の迷路を走れる機体を作らねば
基礎となるソースコードの入手や、在庫整理と追加注文、アートワークやらを進める。
仕様も割り切る
マイコンはRX631の64pin、リポ1セル、ジャイロは今回はアナログ、壁センサはφ③3に変更、エンコーダは使いまわす。
/////
・digkey,マルツの1回目発注完
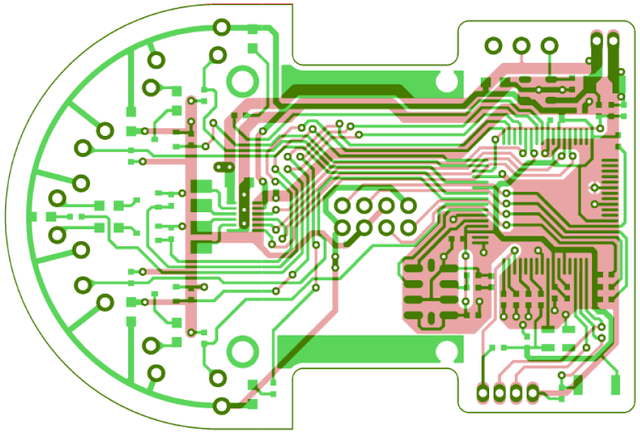
・PCBガーバ確認返信待ち
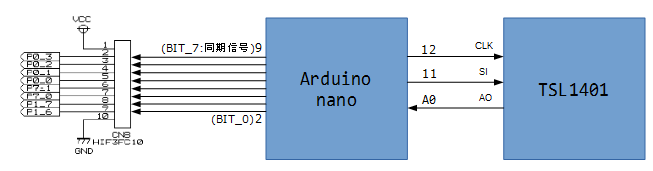
実機が無いので、確認しようが無いがR8C側の受信処理検討。
こんな感じの接続を想定
プロトタイプ宣言に追加
void CamCommProcess( void );グローバル変数追加
/* カメラとの通信用等*/
unsigned char cam_read_u ; /* 同期信号上りエッジフラグ保存用 */
unsigned char cam_trace ; /* トレースデータ保存用 */関数を追加する(P7_0とP7_1がデジタルとして取得できるかは未確認)
void CamCommProcess( void )
{
unsigned char cam_tmp=0;
/*センサデータ取得(トレース) 上りエッジ*/
if(cam_read_u==1 && (p0_3 & 0x01)==0x00 ){cam_read_u=0;}
if(cam_read_u==0 && (p0_3 & 0x01)==0x01 ){//ポート0 bit3の立上りで取り込み
cam_read_u=1;
cam_tmp= (p1_6 & 0x01) + (p1_7 & 0x01)*2 + (p7_0 & 0x01)*4 + (p7_1 & 0x01)*8 +
(p0_0 & 0x01)*16 + (p0_1 & 0x01)*32;
cam_trace=cam_tmp;
}
}mainループで関数を常に呼ぶ。
while( 1 ) {
CamCommProcess();
switch( pattern ) {getAnalogSensor関数を書き換える
int getAnalogSensor( void )
{
int ret;
if(cam_trace!=63){
ret = cam_trace - 31 ;//中心が31の場合
}else{
ret = 0;//とりあえず今回は0にしておく
}
if( !crank_mode ) {
//なんか処理追加
}
return ret;
}・エッジ検出によるライン位置推定
・CPU間用パラレル通信
#define LED 13
#define AO A0
#define SI 11
#define CLK 12
#define BIT_7 9
#define BIT_6 8
#define BIT_5 7
#define BIT_4 6
#define BIT_3 5
#define BIT_2 4
#define BIT_1 3
#define BIT_0 2
//エッジ検出閾値
#define MIN_EDGE 3
unsigned char data[32];
void setup() {
// put your setup code here, to run once:
pinMode(LED, OUTPUT);
digitalWrite(SI, LOW);
pinMode(SI, OUTPUT);
digitalWrite(CLK, LOW);
pinMode(CLK, OUTPUT);
ADCSRA = ADCSRA & 0xfd;//Division Factor 128->32
pinMode(BIT_7, OUTPUT);
pinMode(BIT_6, OUTPUT);
pinMode(BIT_5, OUTPUT);
pinMode(BIT_4, OUTPUT);
pinMode(BIT_3, OUTPUT);
pinMode(BIT_2, OUTPUT);
pinMode(BIT_1, OUTPUT);
pinMode(BIT_0, OUTPUT);
Serial.begin(9600);
while (!Serial);
}
void loop() {
// put your main code here, to run repeatedly:
signed char min,max,dif;
unsigned char maxad,minad,out;
delay(500);
while(1)
{
digitalWrite(BIT_7, LOW);
digitalWrite(SI, HIGH);
digitalWrite(CLK, HIGH);
digitalWrite(SI, LOW);
delayMicroseconds(10);
digitalWrite(CLK, LOW);
for (int j = 0; j <32; j++){
data[j]=analogRead(A0)/4;
digitalWrite(CLK, HIGH);
digitalWrite(CLK, LOW);
digitalWrite(CLK, HIGH);
digitalWrite(CLK, LOW);
digitalWrite(CLK, HIGH);
digitalWrite(CLK, LOW);
digitalWrite(CLK, HIGH);
digitalWrite(CLK, LOW);
}
min=-MIN_EDGE;
max= MIN_EDGE;
minad=0;
maxad=0;
for(char j=0;j<31;j++){
dif=data[j]-data[j+1];
if(j<30 && dif<min){min=dif;minad=j;} //黒→白エッジ検出
if(j>1 && dif>max){max=dif;maxad=j;} //白→黒エッジ検出
}
if(min==-MIN_EDGE || max==MIN_EDGE ||(minad>maxad)){
out=63;
//63:検出エラー
}else{
out=(minad+maxad);
//out=31位が中心に白線がある状態 15~45位の範囲で横ズレ量を示す
}
Serial.println (out);
if(out>=32){digitalWrite(BIT_5, HIGH);out=out-32;}else{digitalWrite(BIT_5, LOW);}
if(out>=16){digitalWrite(BIT_4, HIGH);out=out-16;}else{digitalWrite(BIT_4, LOW);}
if(out>= 8){digitalWrite(BIT_3, HIGH);out=out- 8;}else{digitalWrite(BIT_3, LOW);}
if(out>= 4){digitalWrite(BIT_2, HIGH);out=out- 4;}else{digitalWrite(BIT_2, LOW);}
if(out>= 2){digitalWrite(BIT_1, HIGH);out=out- 2;}else{digitalWrite(BIT_1, LOW);}
if(out>= 1){digitalWrite(BIT_0, HIGH); }else{digitalWrite(BIT_0, LOW);}
digitalWrite(BIT_7, HIGH);
delay(10);//露光時間
}
}
カメラ誘導マシンでよく使われているTSL1401をArduinoで動かしてみる
とりあえず128画素を読んでみると
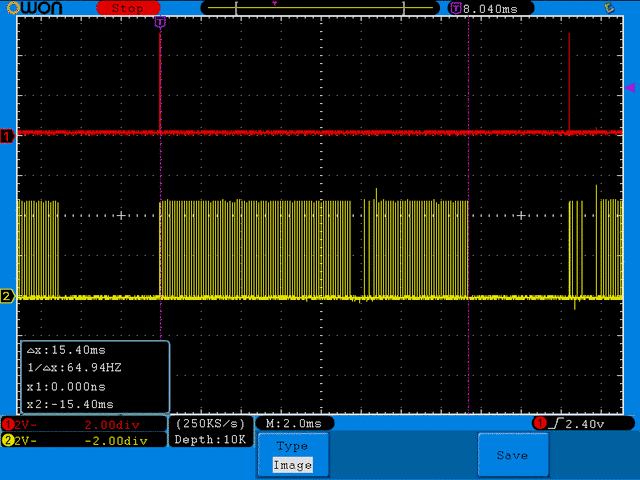
1フレームの読み込みに15.4ms程度かかっている。遅すぎる。
ので、高速化を検討。
まず、128画素も使わないので4画素に1回のみ取り込むことにしてAD変換の回数を1/4にする。
ライントレースに使うデータとしては、32画素もあれば十分だろう。
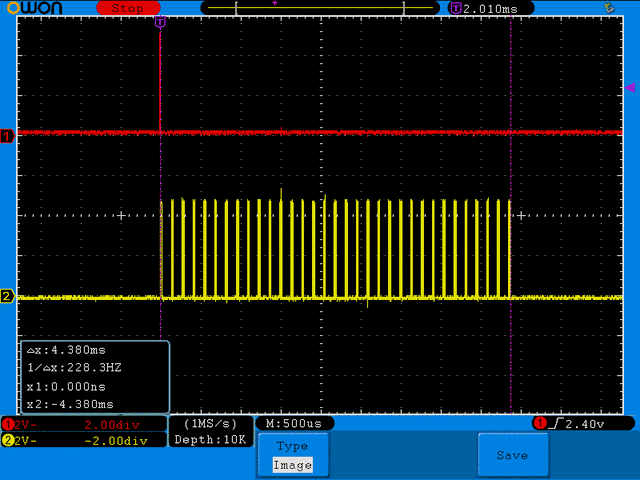
4.38ms位になった。これで、露光時間を含めると150fps~160fps位になりそう。
でも、Advanceのセンサ置き換えには、もう少し欲しいところ。
遅い画素の読み取り(AD変換)に手をつける。
analogRead()を早くしたい。
garretlabさんを参照すると
Arduinoの初期化関数init()内でADCの変換時間を決めるADCSRレジスタを設定しているようだ。
早速、hardware/arduino/avr/cores/arduino/wiring.cを覗くと
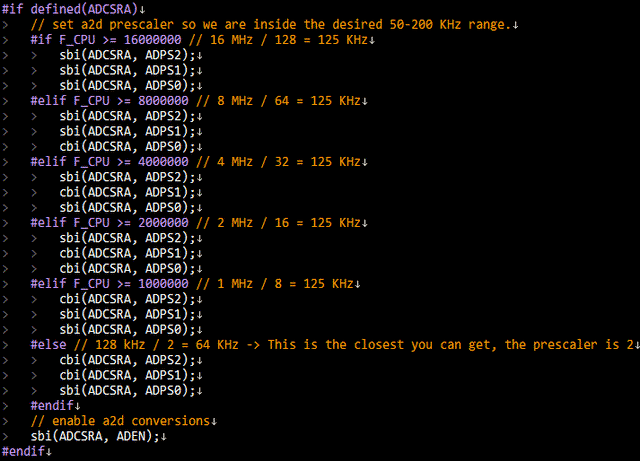
と書いてある。Arduino Nanoは16MHzなので、ADCSR=0b111(分周比128)になってそうである。
ので、スケッチに戻り、void setup()に下記コードを追記して分周比を32に変更する。
ADCSRA = ADCSRA & 0xfd;//Division Factor 128->32
と、
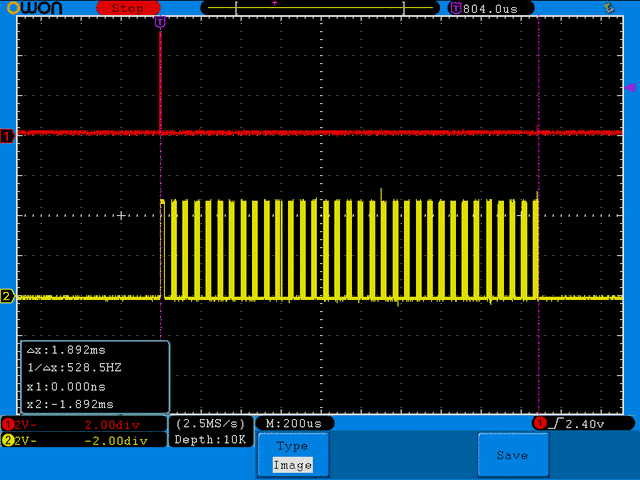
1.892msとなった。露光時間が2msなら 250fps相当になる。
#define LED 13
#define AO A0
#define SI 11
#define CLK 12
unsigned char data[32];
void setup() {
// put your setup code here, to run once:
pinMode(LED, OUTPUT);
digitalWrite(SI, LOW);
pinMode(SI, OUTPUT);
digitalWrite(CLK, LOW);
pinMode(CLK, OUTPUT);
ADCSRA = ADCSRA & 0xfd;//Division Factor 128->32
Serial.begin(9600);
while (!Serial);
}
void loop() {
// put your main code here, to run repeatedly:
delay(500);
while(1)
{
digitalWrite(SI, HIGH);
digitalWrite(CLK, HIGH);
digitalWrite(SI, LOW);
delayMicroseconds(10);
digitalWrite(LED, HIGH);
digitalWrite(CLK, LOW);
for (int j = 0; j < 32; j++){
data[j]=analogRead(A0)/4;
digitalWrite(CLK, HIGH);
digitalWrite(CLK, LOW);
digitalWrite(CLK, HIGH);
digitalWrite(CLK, LOW);
digitalWrite(CLK, HIGH);
digitalWrite(CLK, LOW);
digitalWrite(CLK, HIGH);
digitalWrite(CLK, LOW);
}
digitalWrite(LED, LOW);
Serial.println (data[15]);
delay(5);
}
}逆境からのスタートでしたが、その後は幸運に恵まれ
予選、部門とトーナメント優勝できました。
皆様の助言と、各所で、調整させて頂いたおかげです。
ありがとうございました。
大会を運営してくださったルネサスの皆様や参加者の皆様。
楽しい時間をありがとうございました。

東海大学熊本キャンパスで行われた東海大学 Challenge Cup 2017に参加してきた。
参加台数が90を超える大きなイベントとなっていた。
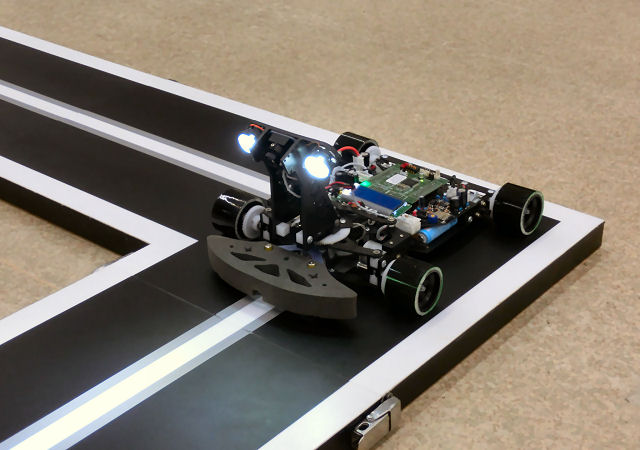
N氏のカメラ誘導マシン。アッカーマンに進化していた

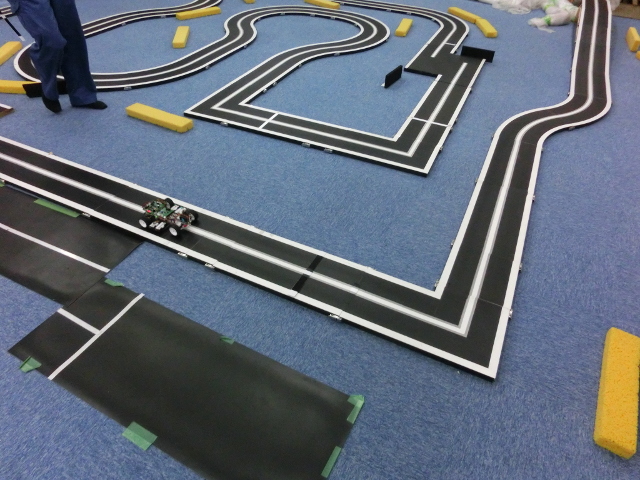
小中学生によるマイコンレーサーの走行回。
大会は
前日試走から色々やらかすもギリギリ部門優勝。
しかしタイムで適わず。エキシビジョンでも追いつけない。
大会を開催して下さった東海大学の皆様、熊本の先生の皆様、お疲れ様でした。