同定したDCモータの伝達関数を利用してコントローラを作成してみる
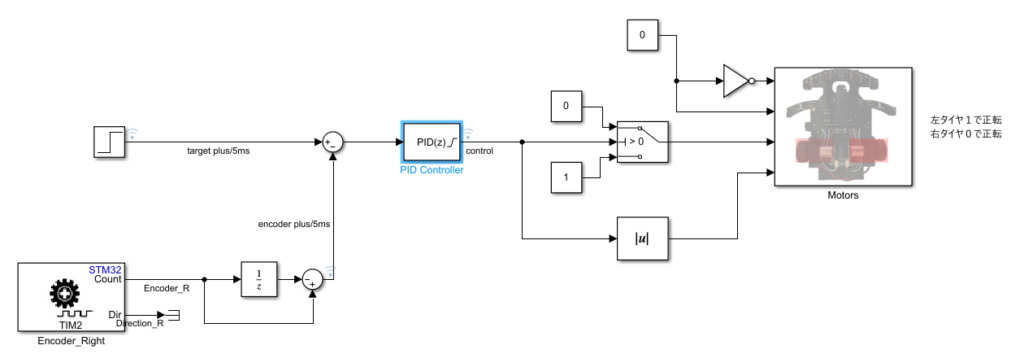
①おもむろにsimulinkでブロック図を作る
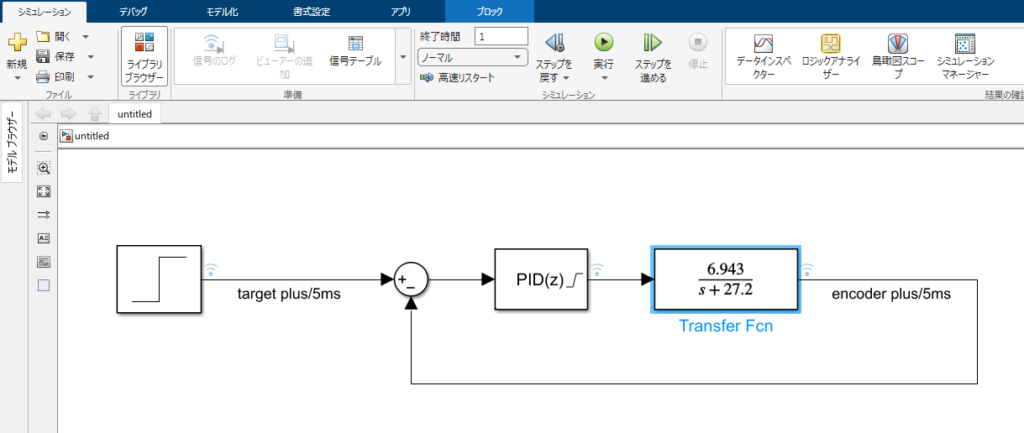
ステップ入力、Sum、PIDコントローラとTransfer Fcnブロックを配置してFB系を作る。Transfer Fcnには前回導出した伝達関数を入力する。
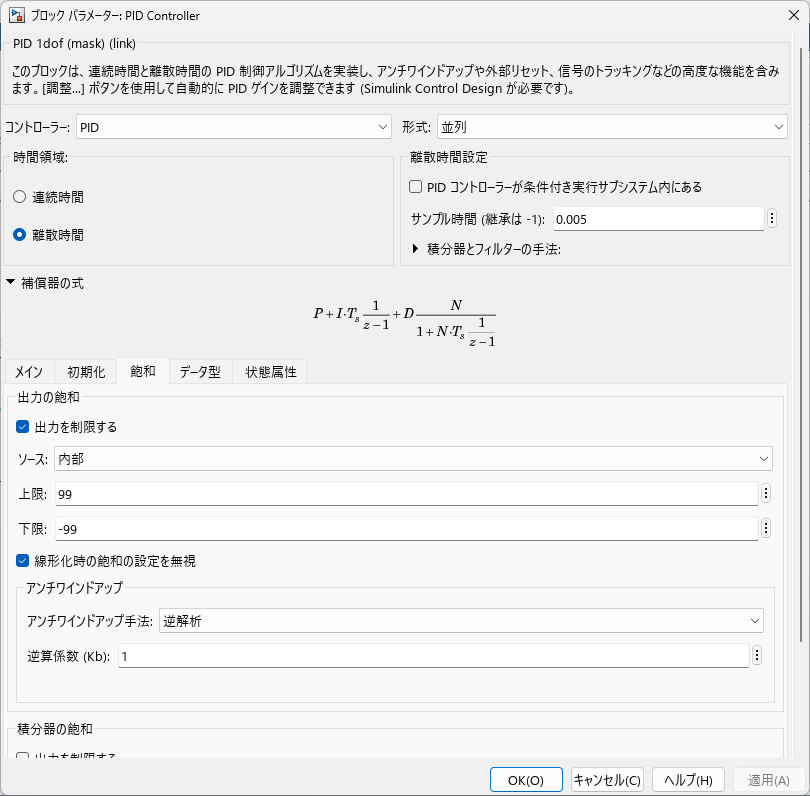 PIDコントローラは離散系にして、サンプリング時間は実機に合わせて0.005sに、実機に合わせて出力の上下限とアンチワインドアップも設定しておく。
PIDコントローラは離散系にして、サンプリング時間は実機に合わせて0.005sに、実機に合わせて出力の上下限とアンチワインドアップも設定しておく。
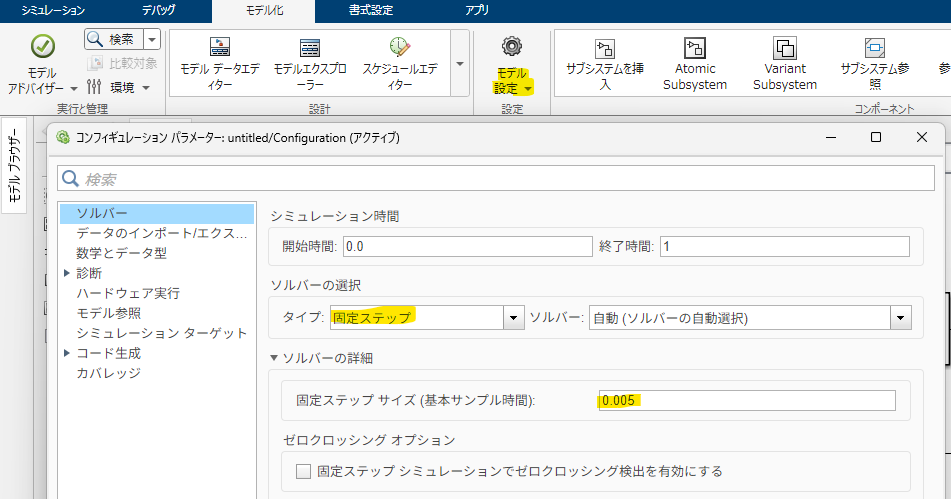
②モデル設定のソルバーを固定ステップにして、時間を0.005sに設定する
③PIDコントローラーのゲインを調整する
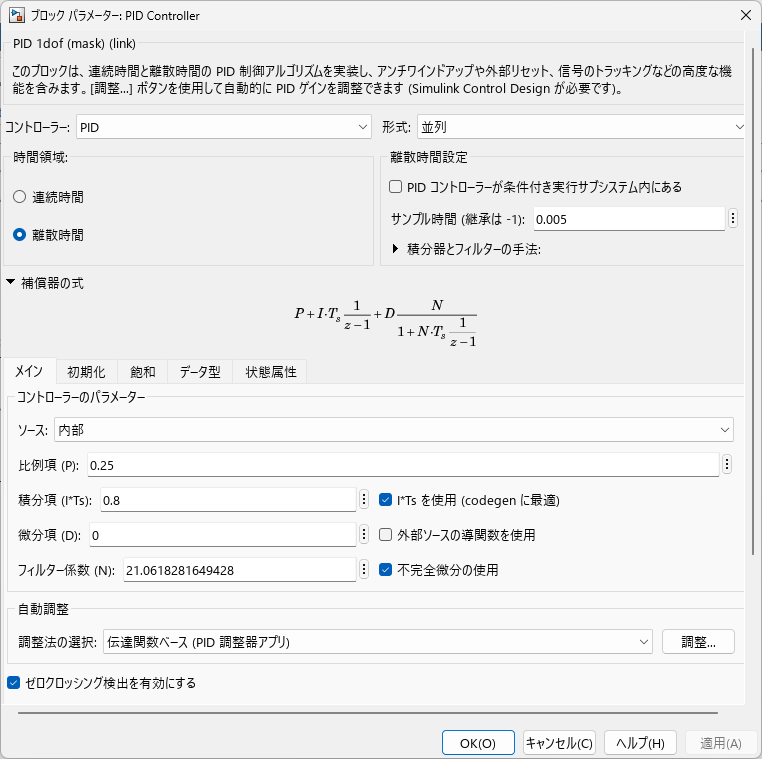
シミュレーションの結果を見ながら調整を行う。
本当は自動調整を利用したかったが、離散系を選択するとゲインの自動調整ではゲインが強すぎて発振したため断念。
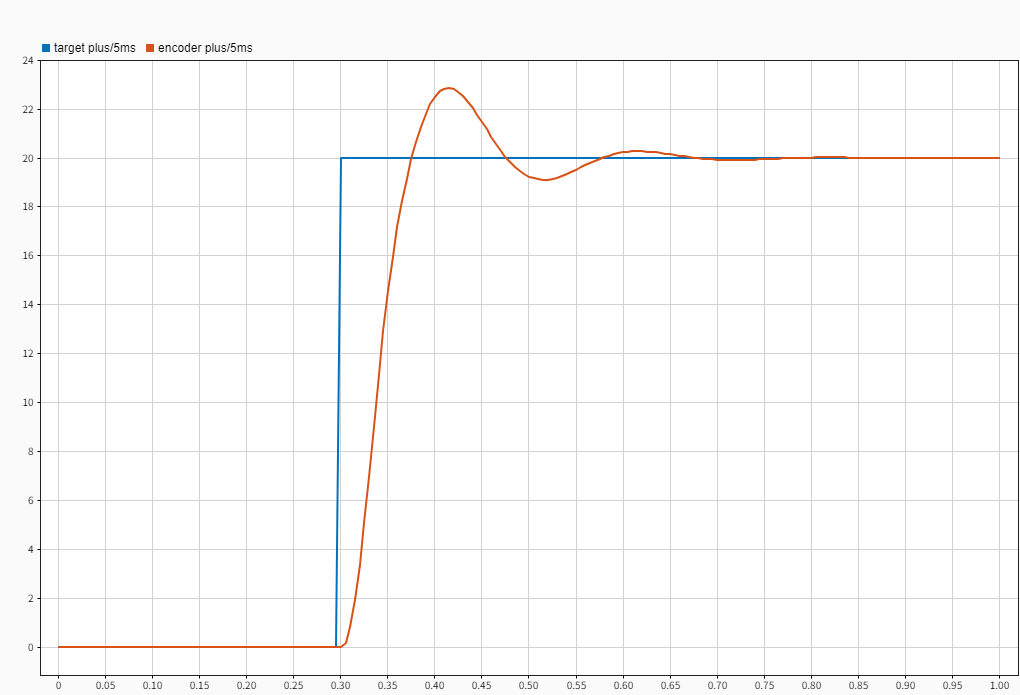
合わせこんだ結果の波形
④実機制御のslimulinkを立ち上げで、調整したPIDコントローラーをコピー貼り付けする
⑤監視と調整を行い実機の波形を取得する
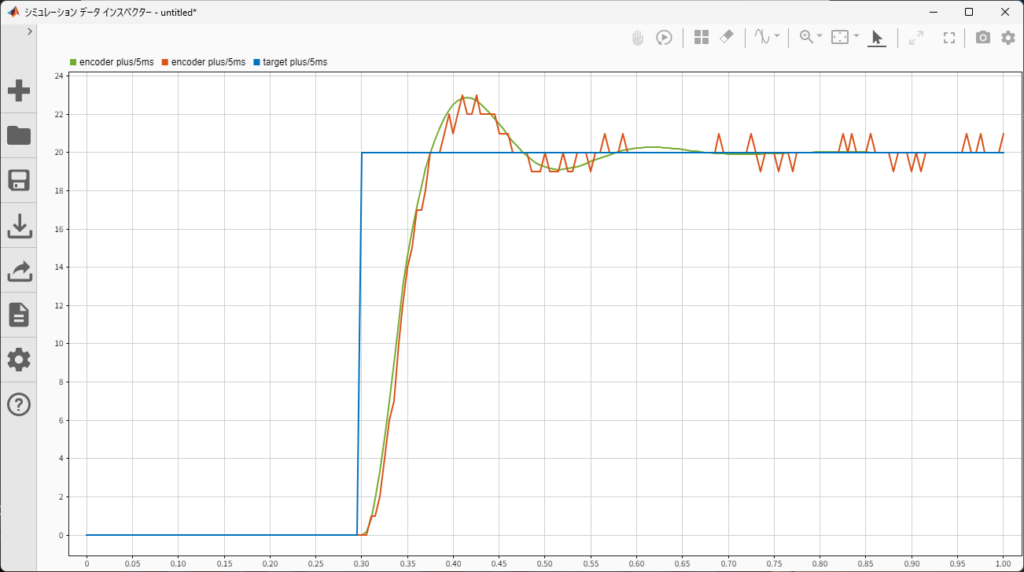
緑がシミュレーション結果で、赤が実機の応答結果。かなり一致しているようだ