
先生と一緒に東京へ。
画像処理部門は参加者が少なかったせいか、
決勝トーナメントはAdvanceと統一されてしまった。
カツカツ設定で走らせて一矢を報いる。
結果は「やりきった」というか「やってもうた」。
マイコンレーサ部門では完走できなかったが、
チキチキレースで楽しめた。
大会を運営してくださったルネサスの皆様ありがとうございました。
技術交流会や懇親会も大変楽しめました。
先生と一緒に東京へ。
画像処理部門は参加者が少なかったせいか、
決勝トーナメントはAdvanceと統一されてしまった。
カツカツ設定で走らせて一矢を報いる。
結果は「やりきった」というか「やってもうた」。
マイコンレーサ部門では完走できなかったが、
チキチキレースで楽しめた。
大会を運営してくださったルネサスの皆様ありがとうございました。
技術交流会や懇親会も大変楽しめました。
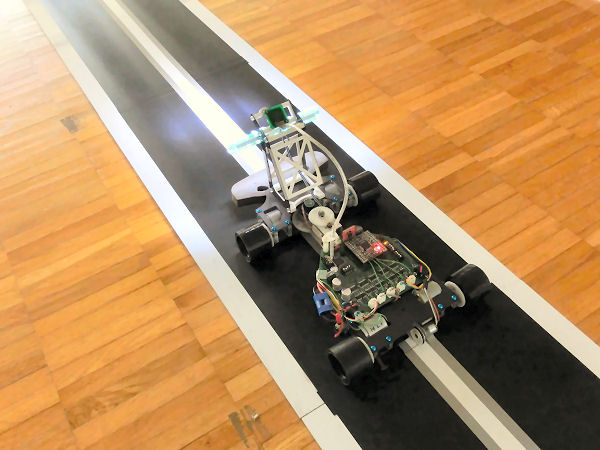
マイコンカーを早く走らせるためにはセンサバーを伸ばすことが有効である。センサバーが長いほど、直線区間とコーナ区間との緩和曲線が緩やかになり旋回走行にスムーズに移行することができる。また、クランクや車線変更でも手前から操舵を開始でき、緩い曲線での旋回が可能になるため走行速度を保ちやすくなる。
実際に最近ではセンサバーが特に長く設計され、前輪の中心からラインセンサまでの長さが30cm以上あるロボットも珍しく無い。
画像処理マイコンカーではセンサバーを伸ばす代わりに、遠くを撮影することに取り組むことになる。
可能な限り遠くを撮影するため、カメラは競技規則の高さ150mm以内の制限いっぱいの高い位置に取り付け、浅い角度でコースを撮影する。
コースを撮影する角度を浅くすることで、より遠くを撮影できるようになるが、外乱光が映りこみやすくなる事や、補助照明による反射光が減少してしまう等の影響が出てくる。坂道頂上ではさらに撮影角度が浅くなることも考慮して撮影角度を決定する必要がある。
「件」では試行錯誤による結果として、前輪タイヤ中心から255m~285mmの場所を撮影している。
///////////////////////////////
福工にて最終調整。
タイムロスの原因となっていた車線変更区間のパラメータを見直す。
リズムが少し良くなった気がするが、タイムへの影響は不明。
条件を修正したハーフライン、クロスラインの判定処理は、いまのところ不具合発生せず。
来週はガンバロー。
//////////////////////////////
オプセルへの粘着力が高いテープの評価を後輩にお願いする。スポンジからの剥離の心配はなさそう。

フリースケールカップのカメラを購入してみた。
立派なレンズユニットの分だけ、少し重い。
最近の画像処理マイコンカーで主に使われているカメラデバイスは2種類あり、
一つは今回購入したラインスキャンカメラと呼ばれるもの。素子はTAOS社のTSL1401シリーズが使用されている。撮影解像度は128ピクセル×1ラインで一次元のデータとなる、撮影データはクロックに同期してアナログで出力される。簡易な制御で高速なフレームレートを実現できる。また、広角レンズが搭載されているためコース両端の白線まで見ることができる。
もう一つが、人工網膜チップM64285FP。すでに生産終了しているデバイスのため、PS2の周辺機器である”人工網膜センサーキャプチャーアイ”を分解して入手する。撮影解像度は32ピクセル×32ラインの2次元のデータになり、この素子も撮影データはクロックに同期してアナログ出力されるが、一般的なカメラ素子と同じように、レジスタ設定により露光時間やゲイン調整、撮影モードの変更を行うことができる。
レジスタ設定により短い露光時間による暗い絵のゲインを変更して明るくしたり、32×32画素のデータを全て取得せずに、途中で転送を切り上げるといった操作により高速なフレームレートを実現することができる。
搭載されいるレンズはシンプルな物で、画角は狭い。
“件”ではクロスラインやハーフライン検出に2次元データを使用するアルゴリズムのため、この素子を採用している。
////////////////////////////////////
先週のコースアウトのログを眺める。
左ハーフラインを検出直後に、右ハーフラインを後検出してクランクモードに移行していた。
過去の走行データを参照したところ、実際のクランクでは発生しないパターンだったので、このタイミングで誤検出してもクランクモードに移行しないように条件を変更する。

東海大学熊本キャンパスで行われた東海大学 Challenge Cup 2014に参加してきた。
2回目となった今回はMCR事務局の公式サポートが入り、また、卒業式を終えた3年生も多数参加したことで、参加台数も約80台に増えて、より賑やかな大会になっていた。
新調されたばかりのコースはグリップが高く走りやすいが、R450の多いレイアウトのため、53m程のコース長にしてはタイムを出しにくい。
開会式が終わり、昼過ぎまで4時間のフリー走行による予選が行われた。
十二分に時間があるため何度も走らせて最高タイムを出すことができるが、
攻めすぎた結果か、坂の上でコースアウトするロボットが多かったように見えた。
高校新人の部には一校あたり4台までしか決勝トーナメントに進めないルールがあるため、同校内での1/100秒単位の椅子取りゲームが行われ、終盤には激しい順位変動が起きていた。
また、長い予選時間にも係らず丁寧に行われていた実況アナウンスが印象的だった。

予選が終了後にはソーラーカーレース鈴鹿に参加しているソーラーカーの紹介があり、人だかりのため説明は聞こえるものの、なかなか全体を見ることが困難な状態に。
決勝トーナメント、学生新人の部ではインタビューで優勝宣言をしていた熊工のO君が見事優勝。
一般の部では、3年生同士のレースがあったり、その3年に追い回されることもあったが、最終的には全国大会でも活躍したK君が安定した好タイムで優勝。
久々のコースアウトはハーフラインマーカーをクロスラインマーカーと誤検知したことが原因だった。
大会を開催・運営して下さった東海大学の皆様、熊本の先生の皆様、MCR事務局の皆様、3年生も皆さんお疲れ様でした。

日の光の入る出入り口付近に坂道が設置されてあり、ハレーションにより坂の頂上で車線変更モードに入っている。
教授の記事が読めるのはインターフェースだけ。
ヘリコプターの制御のための加速度センサ+ジャイロセンサによる空中での姿勢角の推定方法。実際の制御コード、プロペラサイズによる制御性の比較等が紹介されている。
FPU内臓だと三角演算も高速に出来るらしく、マイクロマウスにはFPUが欲しい。
///////////////////////////////////
電通代杯で見つかった不具合
最近まで256kbitのEEPROMに8バイト/10msで書き込んでいて、20秒区切りで2走行分のログを保存していたが、保存したいデータが増えた為に16バイト/10msに変更したところ、10秒間×2走行分になっていた。
そのため1周で19秒ほど掛かる電通大杯では、半周走ったところでログが切れていた。
本の記録時間に戻すにはメモリの容量アップのためにSDカードやFRAMに移行する必要があるが、気力と実装面積が無いので24FC512を注文する。

流行のオプセルタイヤ。
既に似たような柔らかさのスポンジを使っていたので気にしては無かったが
これだけ流行ると、試してみるべきだと思い始めた。
しかし、長年使用してきたパイロンクリスタル(写真左)では、
対オプセルでの粘着力が非常に弱く、すぐに剥がれてしまうため、
ここを解決しないと、タイヤを作る気が起きない。
ということで、何種かのOPPテープと”ばねばかり”を購入して粘着力を評価してみた。結果として、粘着力がパイロンの20倍程度あり、剥すとスポンジ面が少し千切れる物が見つかった。
///////////////////////
追記
一般的に基材の厚い物ほど粘着力が強いが、厚い基材になるほどタイヤが固くなってしまう
そこで基材厚さ0.04mmで粘着力の強い物を探した結果が↓
王子タック イージーカットテープ No.207H
電気化学工業 カラリヤン カットEスーパー40 #484
電気化学工業 カラリヤンPP粘着テープ PP40M PP40M
3種ともにオプセルに対して強い粘着性があるが
イージーカットテープとカットEスーパーは、テープがカールしてしまう

電通大杯に参加してきた。
今年の大会は自由工房の部室から飛び出して、約77mのコースで120近い参加人数という、大きな大会になっていた。
9時少し前に会場入りすると、3階の選手控え室には既に多くの参加者が集まっている。空いている側の控え室でSCITECS_MCRさんと準備を始める。近くには淀川工科のチームやT教授、そして技術結社。準備もそこそこに久々に顔を見る方々に挨拶に。
1階に下りてコースの下見。競技会場はガラス張りの壁で全体的に明るく、コースは第1回RMCRかMCR神奈川大会位 いらい の長くて走り甲斐あるレイアウトになっていた。
午前中は試走時間。この規模/環境のコースで試走が2回縛りとなると、昔を思い出す緊張感があってオモシロイのだけど、試走回数は無制限となった。
結局試走は2回にして、情報交換。
画時処理クラスはだいたい偏光フィルタを搭載していたり、VOLTフレーム?なRWDや、車線変更で素敵な走行をする4WSがあったり、オプセルタイヤが急増していたり。
試走をした画像処理クラスの参加者から悲鳴が上がっている。環境光が明るいため、カメラの出力がサチってスタートバーやマーカーの誤検出が起きているそう。昨年までの蛍光灯のみの環境に比べて、太陽光も入ってくる環境では、外乱への耐性の要求がかなり厳しくなっている。
当方のログを見てもコースの認識ミスやマーカの誤判定は起きているようだが、なんとかリカバリできる程度に収まっていた。日ごろから結構アバウトな光環境の下で調整しているのが功を奏したようだ。
お昼に開会式が行われ、その後の競技はBasic,Advance,一般,画処理の順番でタイム測定が行われたが、進行がとても早い。これは、午前中に坂道と全高の車検が行われ競技前にはタイヤ検査だけになっていること、2台並走でのタイムアタックによる時間短縮と、選手の会場への誘導のスムーズさによるものだろう。
競技成績は画処理部門1位。流石に一般とAdvanceのタイムには届かなかったが、電通大杯で2回完走は久々の気がする。
閉会式での表彰では好きな副賞を選べるようになっていた。で、シリコンシート10枚を頂く。
大会後は自由工房部室に戻って懇親会。ここでのコミュニケーションが電通大杯の楽しみの一番でもある
大会を運営して下さった大阪電気通信大学スタッフの皆様、ルネサス マイコンカーラリー事務局の皆様、近畿実行委員会の皆様、参加者の皆さんお疲れ様でした。
車線変更での減速が目立つ。ロボットの構成による問題なので、どうしたものか

ロボコンマガジンにJMCR2014全国大会の記事。
画処理ロボットで大会に挑んだ学生さんが、半ページもの掲載面積で紹介されていた。
///////////////////////////////
ソースコードを眺めていると、1年半くらい前?に作りこんだバグを発見
直線で4.8m/s以上出すと、その後のコーナでトレースが怪しくなる原因が分かった。
///////////////////////////////
今週末は電通大杯
金土はニューコマンダーに泊まります。

去年の撃沈に懲りずまたニカド電池に手を出す。
日本製のカドニカがAmazonで売っていたので入手してみる。
データシート上でのセル重量はKR-1100AAUよりも1g軽いが、eneloop liteよりも4g重い。
大電流放出時の特性はデータシートでは比較できないので、先の走行会にて実走行で比べてみた。
で、スタートからの時間vs速度のグラフが↓
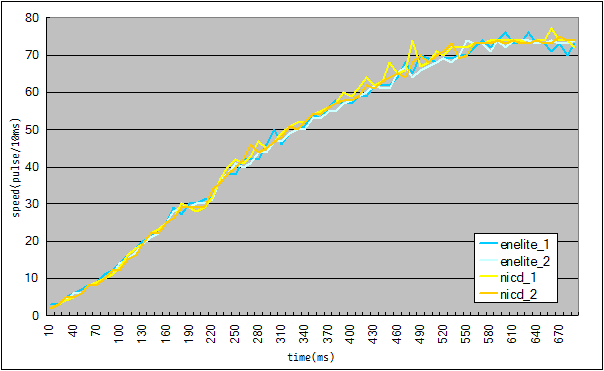
共に満充電のeneloop liteとN-700AACで、それぞれ2回走行での結果になる。
両者のデータが重なってしまったのは何故だろうか?
(ちなみに、1周50m程度のコースでのタイム差も”ゆらぎ”と判別不能な0.05秒程度)
ニカドにすることでの車体重量増加の約5%が、放電特性の差を相殺してしまったのか?
////////////////////////////////
N-700AACを充電してみると、なかなかデルタピークがとり難い
満充電になってもあまり温度が上がらない特性のせいか、
1.5C(1A)充電にしてもセル当り10mV設定ではタイミングを逃すことがある。
福岡工業大学で開催された福岡県マイコンカーラリー技術交流会に参加してきた
午前中は講義セクション。
中村先生からBasicのメカデザインのポイントについて紹介があり、

後藤先生からはBasicの制御について、タイムを出すためのノウハウを紹介。
井上先生からはタイムの壁を破り 強豪に上り詰めるために、10年間編み出してきた技術の紹介。という感慨深い内容でした。
午後は走行会
タイヤが機能する室温と、駆動モータとバッテリコネクタの新調の効果もあってか、久々の快速走行になった。