横須賀に会場を移したRMCRに参加してきた。
結果は、久々に予選一位通過するも、3回戦でコースアウト。
修行が足りんということか

開会式
ここで5年前に、カメラ誘導ロボットの挑戦が始まったと思うと感慨深い
そして、次の課題は何だろうかと考えてしまう
とっても盛り上がったGR-PEACH画像処理部門
楽しい時間を有難うございました。
junさんおめでとうございます
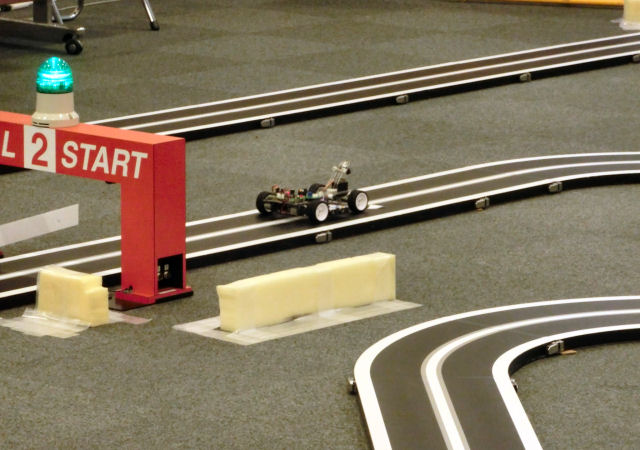
今回のコースは なかなか 走りにくい面白いレイアウトとなっていて
まさに横須賀大会という感じだった
横須賀に会場を移したRMCRに参加してきた。
結果は、久々に予選一位通過するも、3回戦でコースアウト。
修行が足りんということか
開会式
ここで5年前に、カメラ誘導ロボットの挑戦が始まったと思うと感慨深い
そして、次の課題は何だろうかと考えてしまう
とっても盛り上がったGR-PEACH画像処理部門
楽しい時間を有難うございました。
junさんおめでとうございます
今回のコースは なかなか 走りにくい面白いレイアウトとなっていて
まさに横須賀大会という感じだった

久しぶりの福工へ
色々と他のコースを走らせて分かったが、微妙にグリップが低いっぽい。
その為かは分からないが、複合コーナでエラく滑るので複合コーナでのR判定条件を変更する。
速度切り替えタイミングが早まったことで、若干落ち着きを取り戻せた。
R600とR450では曲がれる速度が異なる。
車体性能の良い車ならば操舵角度に応じて速度を変更することで上手く対応できるようだが
無茶をしている車では、操舵角度が増えてから目標速度を変更しても間に合わない。
そこで、コーナ進入直後のGが掛かる前までの区間では前輪の横滑りは無い物とした場合に
コーナ進入時から操舵角度が任意の角度に到達するまでの走行距離はR毎に異なる事を利用して
操舵角度が小さい内に、そのコーナがR450である事を推定して目標速度を下げることが有効な手となる。
といっても、直線からのコーナへの進入時と、S時や複合コーナでの切り返し時では条件が異なるため、
それぞれの場合毎に判定条件を持つことになるし、どうしても判定ミスは発生する
結果、久しぶりに記録更新しての 走り収めとなった
試走日には行けないため、当日上手く走れば良いが。
ありがとうございました。

淀工さんにお邪魔させていただき、調整を進める。
参加している競技が多いクラブで、ロボカップサッカーやロボトレース等
一度に何種類ものロボットを見ることができる。他の競技も楽しそう。
MCR班も、コース状態が得に良いことや、なかなか見ない計測器等があって
着実に開発・調整を進めているよう。
さて、RMCRに向けては、
開発スタートが遅れを取り戻せず、今シーズンはココまでかという所で、
Hさんよりスタート処理の改善ネタを教えて頂いた
なるほどの内容なので、早速、マネして実装する。
ありがとうございました。
