

お腹一杯でした。
//////////////////////////////////////
十万石クラブさんから宿題をもらっていたので回答
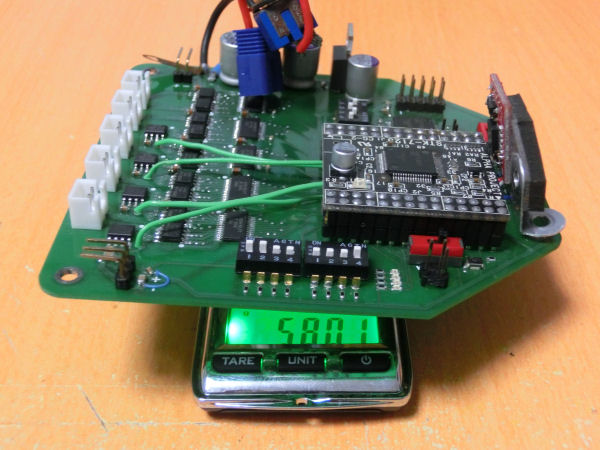
生基板:19.6g
実装済み(電源SW,コネクタ含む):58g
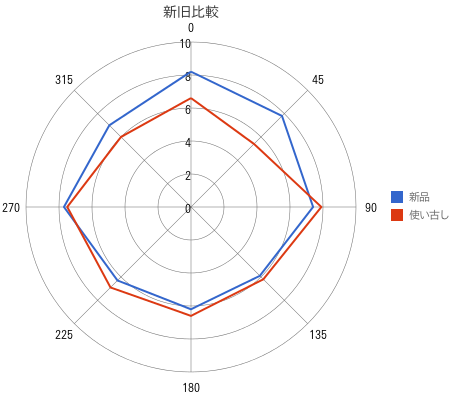
新品モータと使い古したモータでの静止トルクの比較が上のグラフになる。(2.0Vの定電圧駆動で測定)同じ固体の比較ではないが、古いモータ(赤線)のほうがトルクが小さい。
新品と使い古しモータの差はどこから来ているかというと、大半はコミュの表面状態ではなかろうか?
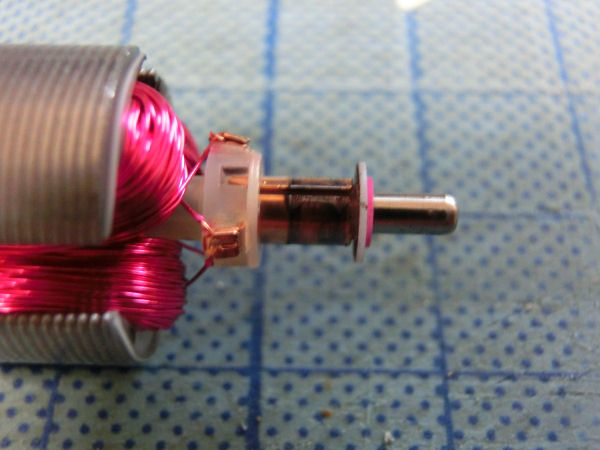
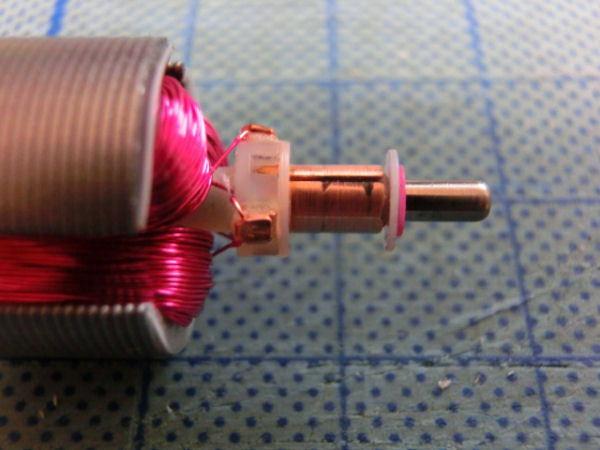
4ヶ月使用したモータのコミュは上図のようになっている。コミュ表面が酸化している。この酸化によりコミュとブラシ間の抵抗が大きくなるようで、モータ端子間の抵抗値も新品ならば2Ω~3Ω程度だが、使い古した物だと3Ω~5Ω以上の値になっていた。
駆動用のマブチモータを変える目安として、端子間抵抗が4オームを超えたときってのはどうだろうか?(ちなみにほとんど使っていないモータも端子間抵抗が大きくなることがあるが、こちらはモータを低い電圧で少し回してやると端子間抵抗が3Ωほどに落ち着くようだ。)
ところで、参考までに酸化したコミュの表面を紙ヤスリ#600で磨いてみる
表面の酸化膜が取り除かれたため端子間抵抗も2Ω代になった。
そして、そのときの静止トルク特性が↓
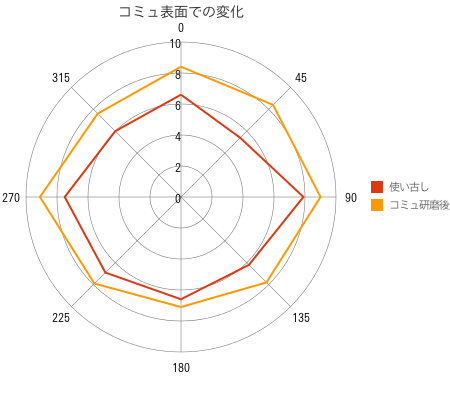
静止トルクも大きくなるようである。
しかし、固体が違うとはいえ、新品よりもトルクが大きいのは何故だろう?新品はブラシ面が出ていないためか?

前回違いが分からなかった補助ヨークによるモータ出力の変化について、再チャレンジしてみた。
今回のモータの静止トルクを比較する。
測定環境は上の写真通りで、安定化電源を用いてモータを1.0A定電流駆動させ、その時のレバー端(ピニオン+長ねじ)に掛かる力を測定する。測定結果にはレバー自体の重さ(約1g)が含まれる。n=2

補助ヨークの種類としてはパーマロイ薄板を幅20mmにカットしたものと、スプレー缶を再利用した0.25m厚の鉄版を16mm幅にカットしたもの、およびそれを2重でモータに巻きつけた物の3パターンで比較する。
モータ内部のコアの位相によりトルクの変動があるため45度づつモータを回転させて計8ポイントで測定した。
で、測定結果は以下のグラフ
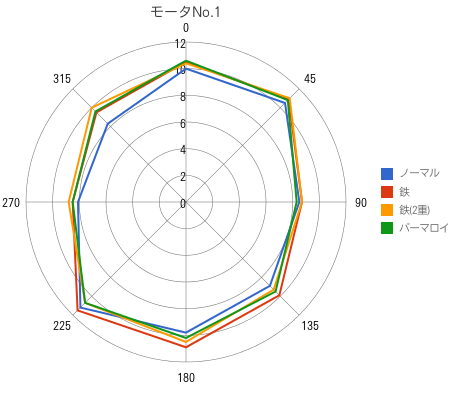
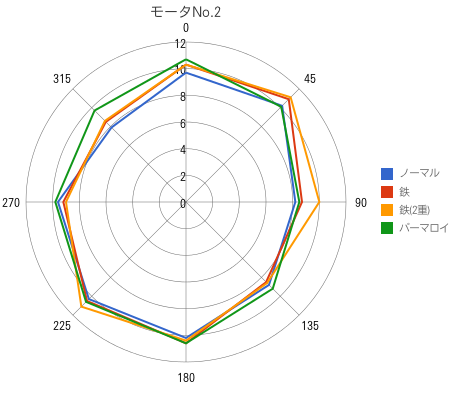
円の外側に行くほどトルクが大きいことになる。
考察するならば
・補助ヨークにより5%程度はトルクアップする。
・鉄版の1重と2重での差がないことから、もっと薄い板でも良いかもしれない。
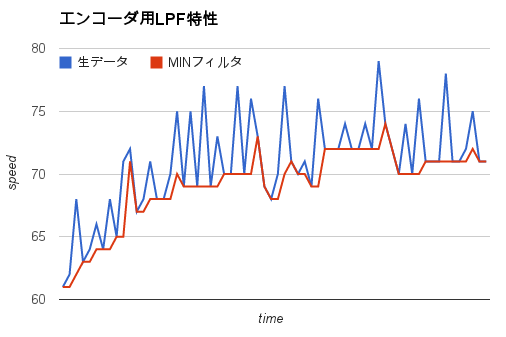
駆動モータが傷んでくると速度計測用のエンコーダの値にノイズが載るようになる。
5ヶ月位使っているモータのせいなのか、エンコーダへのノイズが増えてきた。
4m/s付近から異常に大きな値がでるようになって、その値によるFBのせいで目標速度より低い速度で走ってしまう。
モータを新品に換えるべきなのは間違いないが、そのまえにエンコーダによる速度計測にフィルタを入れてみる。
このノイズ(グラフ青線)の特徴は
・出鱈目な値
・+方向のみっぽい
・たまに入る
なので、エンコーダ信号の2サンプル分の値の小さい方(グラフ赤線)を使用する事にしてみる。
最大でも1サンプル分の遅延なので速度制御にも影響なし。
しばらく様子見をする。
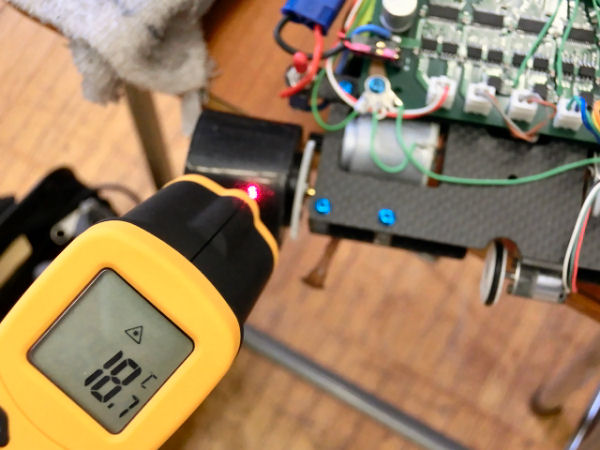
放射温度計によるタイヤ表面温度の測定、室温よりも3度ほど高く測定される。
ここ数年、タイヤのスポンジ材にPORON SR-S-24Pの3mm厚を利用している
柔らかいスポンジだが圧縮による残留歪が非常に小さいため、使っているうちにタイヤがヘタることがなく、20ヶ月程度前に作ったタイヤは今も問題なく使えている。
が、しかし、一点どうしようもない弱点があり
低温時には弾性が下がりタイヤが硬くなってしまう。
硬さの感じも単にガチガチになるのではなく、一度変形すると復元するまでに時間がかかるようになる。
経験上、室温が15度以下になるとグリップは期待できない。
冬場に使うにはエアコン環境が必須となる。
※その前はPORON LE-20の5mm厚を使用していた。LE20のほうが低温時の硬さ変化は小さい。
※スポンジは痛まないが、最終的にはサポート材とスポンジ間が裂けることで壊れる。

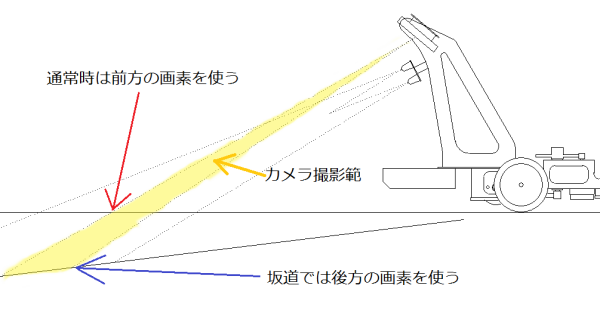
センサーアームは長いほど良いが、カメラ誘導ロボットでセンサーアームを伸ばせない(遠くの画像を使えない)理由の一つに坂道頂上で撮影角度が浅くなりコースを撮影できなくなることが挙げられる。(scitecsmcrさんも指摘している)
今回はそれを助ける実装。
ライントレースに用いる画像ラインを自動で選択するようにする。
まずは最も前方を撮影しているラインを計算に使用する。
最前方のラインでコースを見失った場合には、後方(手前)を撮影しているラインを用いて白線の検出を試みる。
こうすることで、坂道の頂上付近では自動的に手前の画像を用いてライントレースすることになる。手前の画素ほどコースとの撮影角度が深くて照明の反射が強くなるため、コースを見失いにくくなる。

教授の記事が読めるのはインターフェースだけ。
RC用サーボモータの概要と、各社のサーボのスペックが紹介されています。
////////////////////////////////
やっぱりギブアップ。倒立振子作れません。

タイヤを手で回すと「キュッキュッ」とギヤの擦れる音がしているのが気になっていた。
で、ピニオンギヤにフッ素コート剤を塗ってみる。
使用したのはカワダのインパルス・ドライPTFE ”ケリー”。
結果、キュッキュッ音が消えた。
モータを定電圧で回転させた時の電流を確認してみると、若干なりと電流がさがるようで効果ありそう。
実際の走りに効果があるのかは不明。どの程度の耐久性があるかも不安。
ついでに、錆サビになっていたベアリングも交換。
ラジコンショップで買ったものを、格安品に交換してみる。
こちらは、定電圧駆動時の電流が確実に増えている。
手で回した感じではゴリゴリ感も無いので分からない。
ラジコン用に比べて汎用品は硬いグリスが入っているとかはありそうである
まーた懲りずにLED照明を弄って撃沈する
今回は光度35000mcdの超高輝度赤色LEDTLCR5800を試した。
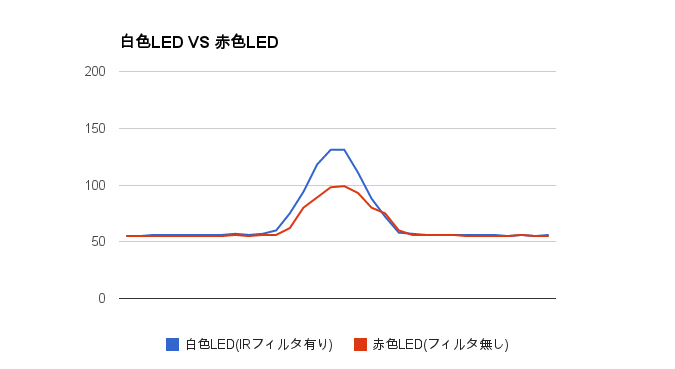
CMOSカメラの感度は赤色から赤外付近にピークがあるため、
赤色LEDを照明にすると効率よく露光できるようになる。
が、感度ピークによる効率よりも白色LEDのパワーのほうが勝るようで、暗くなってしまった。
ちなみに2年前にも同じような検討で失敗している
ということで、日亜NSPW500GS-K1に戻す。
エキシビション走行の機会を頂けたので、宮崎佐土原高校へ。
佐土原駅に着くとkuroさんがいる。凄い活力。

今年のコースはクランク3、車線変更2、R450の蛸壺区間。罠は無いレイアウト。ただ、競技会場の照明のオレンジが強い。5年前に苦しめられた光はこの照明だったか?
予選ではハーフラインが1mに設定されている車線変更での接触やコースアウトが多いように見える。減速中に車線変更に移れないため初期のヨーが不足するのだろうか?
終わってみると予選通過した32台のタイム差は1秒以内という接戦ぶり、県大会からの選抜は流石。
Basicクラスはトーナメントが無いため、2回走行のベストタイムによる代表争いになる。一か八かのような速度での勝負は見ていて非常に面白い。

決勝トーナメントでは熊本、佐賀、福岡、宮崎の4県の乱戦が続く。
1/100単位の勝負が続くなか、安定したタイムを出し続ける佐賀県勢の勢いが凄かったが、更にタイムをのばした熊本勢が優勝を掴んだ
8人?ほどで行ったエキシビションは
数分話した後に走行を行うスタイルで行われた。
(トーナメント形式と違って気が楽である)
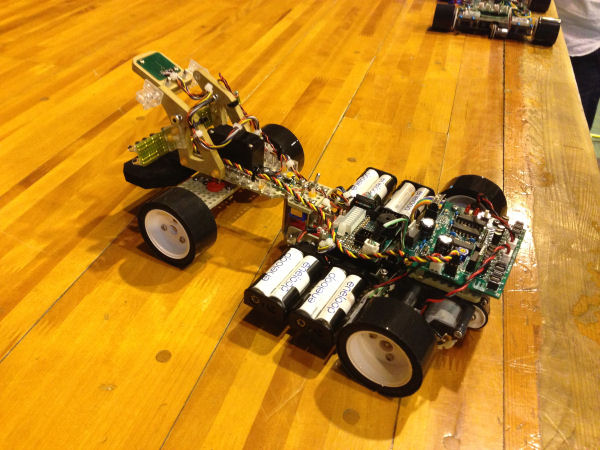
長崎総合大学のIさんのカメラ誘導ロボット。
あと少し詰めれば完走しそうな感じ
帰りにくじら羊羹を買いに行くも、既に売れきれ。残念
/////////////////////////////////////
タイヤ温度23度