
・なんで、ゴール区間の入り口右折してたのだろう
→同一歩数の場合に西向きが最優先になってた
・最初の180ターンが、90度づつのままになっている
→180度ターンへの置き換え処理が、その前後の直線が30区画を超えると動作しない条件になってた。
マイクロマウス2018
マイクロマウス2018
マイクロマウス2018に参加する。結果はマイクロマウス競技ファイナル10位。
昨年のリベンジである32×32の迷路での完走も達成することができた。
楽しく、素晴らしい大会を運営してくださった皆様、ありがとうございました。


関西地区大会

大阪電気通信大学で行われたマウス関西大会。台風による日程変更にも関わらず今年も参加台数が伸びている。写真に収めそびれたが、大会景品も多く豪華。
競技は土曜に試走、日曜に本大会で行われ。日曜は午前中にロボトレースとクラシック競技の前半、お昼休みを挟んで、クラシック競技の後半と、マイクロマウス競技(旧ハーフ)が行われた。
さて、精度は弱向上で機能はだいぶ後退した状態で挑んだマイクロマウス競技は、鬼の居ぬ間に繰上げやら棚ボタやらで3位入賞を頂くことができた。これで全日本に行ける。

皆様。おつかれさまでした。
マイナーチェンジ
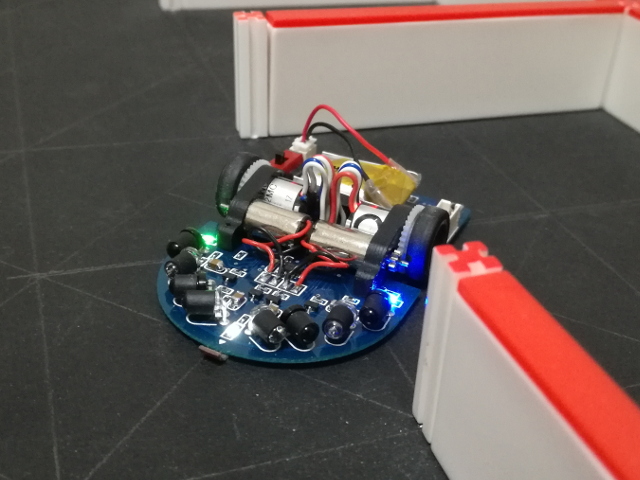
回路と基板を少し変更する。
赤外線センサの発光回路と、角度を変更と、前後重心位置を変更
発光回路は、コンデンサからの放電で最初の電流を初期の電流を増やす形に、応答波形はサージパルスのようなインパルス波形になるので、そのピーク後の、緩やかに下がる期間にAD変換で取り込む。AD変換開始までの待ち時間を変更することで回路部品のばらつきを調整できた。
光軸と、感度を別々に調整できるのは、ありがたい。
(環境光ではなく、環境温度で特性が変わるような?だめかも)
センサの角度
前壁センサは壁に対して10度から5度に、横壁センサは壁に対して45度から30度に変更。
ついに、安定して前壁が見れるようになった
次に、重心位置
余りにセンター過ぎたので、今回は車軸を約1mm後退させて重心を前にずらす。
加減速時のピッチは、少しは良くなったっぽい。
マウスで試行錯誤して思うに、ノウハウというか、勘所というか、最初に抑えているのだろう箇所で躓いている。
恐らく、MCRにも、速く走るロボットには無意識に当たりまえだけど、わざわざ一般化されてない事があるのだろうな