銅線を付けずに試しにペットボトルのラベルを用いて組電池を覆う。

見た目は悪いがどうにかなるようだ。電池自体のラベルが見えるため競技規則には沿っているだろう。
バッテリーシャンテは0.3mm厚の銅板を7mm×21mmに切り使用した。
今回ラベルにはアサヒSUPER H2Oを用いたが、サントリーDAKARAの方が収縮性が良いようである。
月: 2006年3月
歯車到着
ステアリング部に用いる歯車が到着する。
バックラッシュを詰めた時にもスムーズに回転することと、歯数が多い物でも一つの部品で構成されていることを考え、モジュール0.3を選んだ。
モジュール0.5を一年使用したが歯欠けや磨耗が少なかったことから0.3でも大丈夫だろうと考えていたが、実物を見るとクラッシュしたら歯欠けしそうである。

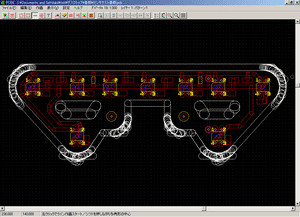
来年度センサ試作品
上図のようなセンサ基板を作成したが集合抵抗と歯車が届かないので作業停止中。
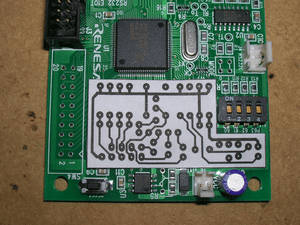
サブ基板設計
J6コネクタの使用方法が怪しくなってきたので、もしもの場合にJ8コネクタに必要な物を乗せるためのサブ基板の設計を行った。手持ちの素子(DIP規格)の関係であまり集積できないが、EPROM1個と4ビットDIPスイッチ、プッシュスイッチ1個、LED3個を乗せることができた。
センサ特性計測
GP2S40の特性を調べる。
センサから床までの距離は1mmとし黒色と灰色の境目上を0,5mm単位でセンサを移動し、その時の出力を計測した。
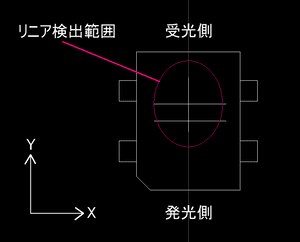
上図のようにリニアに検出できる範囲はX軸方向に2mm、Y軸方向に2.5mmであり、Y軸方向に受光側に0.5mmの偏りがある。
X軸方向の偏りは計測しそびれた。
迷走中
以前書いていたメモを読んでいると
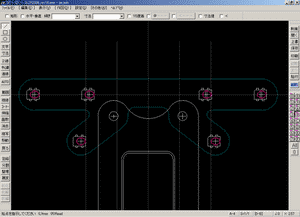
コースチェンジはオフセット
というメモ書きを発見した。下図のような事を考えていたようだ。
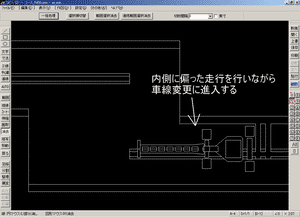
車線変更では予め内側を走行している方が容易に走行できそうであるが、50cm程度でロボットの位置をずらせるかどうかが疑問であるし、位置をずらしている過渡状態でロボットがラインに対して傾いた場合にどう対処すればいいかも分らない。
しかし面白そうなので実装を目指す。20mm程度オフセットできるようにセンサ配置を再び考える。