車体サイズをトレンドと比較してみる
spangle v3 仕様
重量[g]:19.4
サイズ 長さx幅x高さ[mm] :62.5 x 38.5 x 24.5
動輪:4輪/直径13.6 幅3.5mm
重量が約5g重くて、全長が約3mm長いようで、次は
重量はベアリングのサイズと駆動軸の径を小さくして
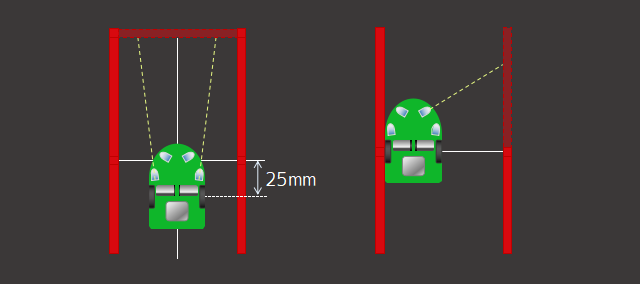
全長はファンのサイズ小さくして、取り付け位置をセンターに寄せよう
ファンの位置がタイヤ軸より前にあるほどに、コース継ぎ目の段差を考慮すると吸引スカートの路面との距離を詰めれなくなるのも改善したい
リアのオーバーハングは短いほうが、スタート直後のターン用に加速距離を微々だけど稼げそう(といっても限度があるので、初手がターンの場合にはパラメータを別にしているのだろうか?)