
マシンは持たず、見学のみ
Basicクラスがメチャ速かった
pidream
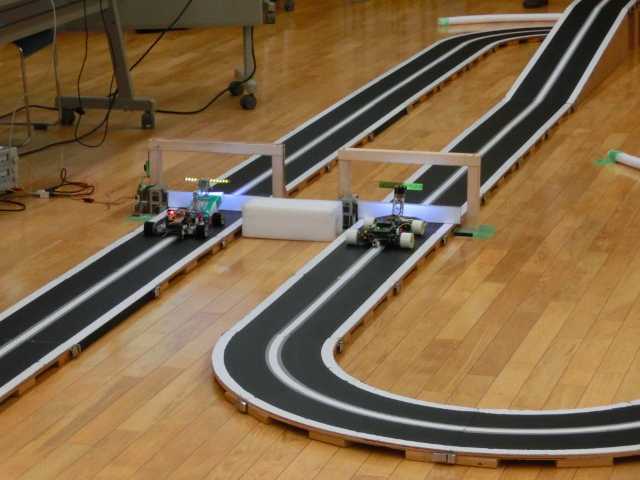
マイコンカーラリー技術交流会
神戸市立科学技術高等学校にて開催されたマイコンカーラリー技術交流会

大会の様子

コース清掃マシン。清掃用ローラは2自由度のリンクで固定され、良い感じに動く
画処理クラス決勝T
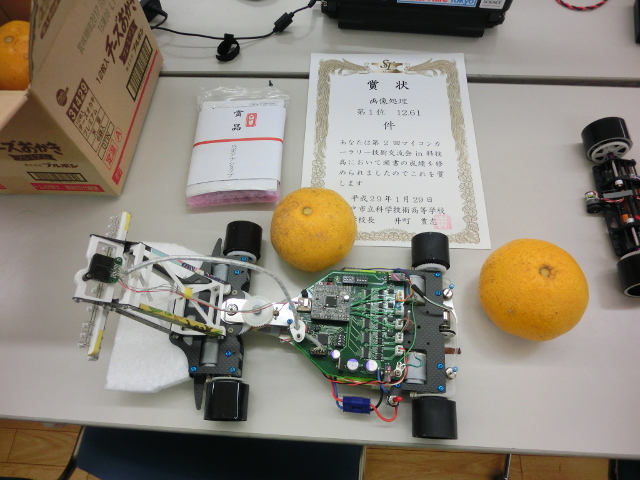
賞品とはっさく。
・前日試走は室温が狭く、タイヤグリップは期待できない状態。
・試しにバッテリをづっと使ってるニカドからづっと放置していたニッ水に変えるとタイムが伸びた
・当日は室温も上がり、タイヤのグリップは十分に
・グリップしすぎて、レーンチェンジの入り口側の柱に当たる→入りのオフセット走行を減らす+進入速度アップで合わせる
・決勝Tで、予備のニカドに変えたらタイムが伸びた
みなさま。おつかれさまでした。
こつこつ
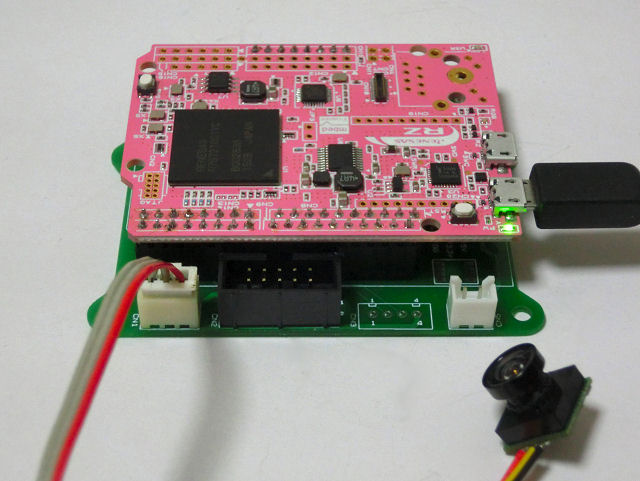
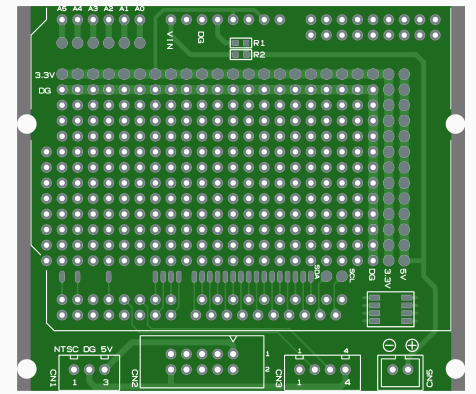
作ったけど、これを繋ぐモータドライブ基板Ver5と車体が無い。
ついでに回路も眺める。
GR-PEACHとモータドライブ基板Ver5を接続するとき、?。
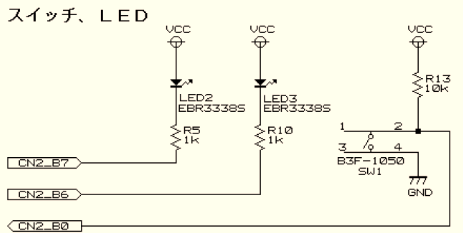
まず、LED側
VCC=5Vだと、LEDのVf=1.7V付近で、RZのポートには3.3Vがかかる。
VCCはGR-PEACHの5Vピンから供給ならば、バッテリ電圧-0.4V程度。
バッテリ電圧が高いと、少しスペックを超えそう。
モータドライブ基板Ver5のLEDは青色とかVfが高い物に変えたい。
次にプッシュスイッチ
VCC(バッテリ電圧-0.4V)がRZのポートにかかる。
R13は未接続にして、GR-PEACH側の3.3VからのPUに変えたい。
つれづれ
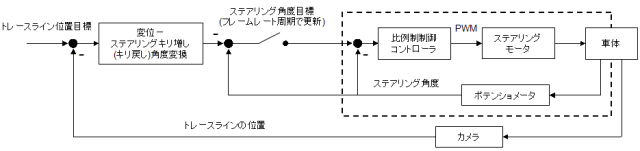
トレースラインを検出するセンサについて、
センサで得た情報を何に使うかで制御方法を考える
①モータ制御量を決定する
標準プログラムのアナログセンサみたいなヤツ
センサから得たズレ量を、操舵モータに印加する電圧に変換する
トレース制御のためには、センサからの情報はリアルタイムに更新される必要がある。
②モータ速度を決定する
センサから得たズレ量から、操舵モータの速度目標値を決定する
制御モータの速度制御は別のFBが行う
これもリアルタイム性は必要。
③操舵角度を決定する
センサから得たズレ量(とか)から、操舵角度目標値を決定する
操舵モータの角度制御は別のFBが行う
この辺から、センサからのデータの更新速度の重要性は、目標値の設定の正確さによって変わってくる。正確に目標値を設定できれば、センサからの情報は、あるていど離散的でもなんとかなる。
Basicの構成はコレ?
④操舵計画を決定する
センサから得たズレ量(とか)から時間/距離毎の操舵角度のシナリオをつくる。
センサからの情報は、シナリオの修正に使用される。
件のライントレース制御は③の構成。これは、画処理マシンの作り始め頃に30fps以下のカメラでの滑らかなトレースするために使用していたのが続いている。当時の画処理マシンのトレンドだったのもある。
今の450fpsとかのカメラでは①の構成でも行けそうだし、他の画処理マシンではその構成も普通のようだ。
NTFCカメラでのトレースしようとすると、③以上の制御が必要になる。突き詰めて行って④が実現できれば楽しそうに思う。
八王子へ

劇的だった
PCBEで設計した基板をスイッチサイエンスPCBに発注する時のメモ
1年前くらいにカンペ作って配っていたのを公開
PCBEで描いた基板をスイッチサイエンスPCBに出そうとすると
プレビューが画面でエラーが出て不安になることがある
(そのままでも、作れたけれど)

んで、そのエラーを回避する方法を紹介
①Gコードデータの編集。
.GBL,GBO,GBS,GML,GTL,GTO,GTSファイルを編集する
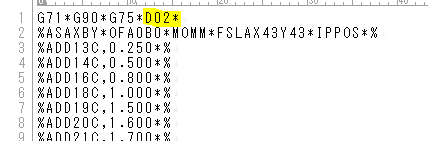
各ファイルをTxtエディタで開いて、先頭行の黄色箇所の[D02*]を削除して
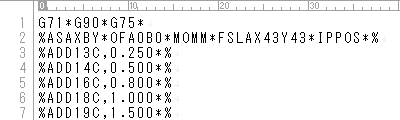
こうする。
②外形データのファイル名
Webの技術情報にはGML,GKOのどっちの拡張子でも行けるように書いてあるが
.GKOだとエラーになる。そのため、拡張子は.GMLにする

こうする。
////
メモ
孔データは、ホール出力で作成
ぼちぼち
久々の更新
・紀北杯に行ったり
・マウス全日本ハーフフレッシュマンで1位を取ったり
・JMCR近畿地区でデモ走行したり
・M科青柳花鳥杯に参加したり
してました。
ところで、
夏大会の結果で、Advanced Class車体部門の表彰者が違ってたり、センサバーレス部門 表彰者の順位が違ってたり、予選完走者にセンサバーレス部門が入ってなかったりする気がするのだが?
面白そうなGR-Peach画処理に向けて、積み本と積みボードを掘り起こす。
GR-Peachの寸法図がなかなか見つからない。たぶんコレなのだろう
ttp://www.core.co.jp/product/m2m/gr-peach/pdf/history/gr-peach_specification_e.pdf
入手できない2SC-310NMの代わり探し
http://akizukidenshi.com/download/ds/sunnic/SC-310NM_20140203.pdf
NTSCカメラならば
http://www.csun.co.jp/SHOP/2014091901.html
とかを使えば5V入力で動くので、12Vは準備しなくてもよさそう
第2回MCR大会in出雲科学館
10月23に出雲科学館で、第2回マイコンカーラリー大会in出雲科学館が行われた。
参加台数は30台ほど、
午前は2回のタイム測定、昼休みあけに1回のタイム測定を行い、ベストタイムで順位を競う。
大会の様子
皆様、お疲れ様でした。
/////////////////////







九州地区大会

ロボスクエアで行われた九州地区大会に参加する。
結果は運よく準優勝。
楽しい大会ありがうございました

大会の様子
場所柄、見学も多い

お昼ごはん
福岡タワー周辺のイベントでありつく
こつこつ
・リポ交換
・電源電圧監視が不安定なの修正(ハード定数変更)
・斜め区間から45度ターンで復帰するときに
復帰に失敗する原因箇所コードコメントアウト
・斜め中90度ターンで、壁切れによる位置補正追加
・斜め直線中の短めの直線でも加減速制御するように変更