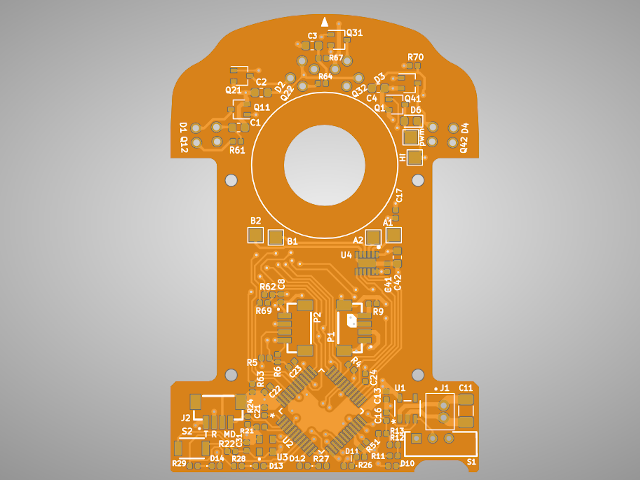
とりあえず形になってきた(吸引スカート未実装)。関西地区に間にあうかな?
下回りのソフトから再確認と、パラメータの校正をすすめる。
ソフトは、全モデルで放置していたものとか、いつもまにか動かないものとかを手直ししていく
パラメータは、左右モータの特性のずれが9%くらいあるのが気になる
校正は下記が一旦完了
・電圧モニタ:電源コネクタ部での電圧と測定値が一致するように変換係数を調整
・モータ特性(逆起電力とか):この方法
・ジャイロ:4回転させて誤差が3度以内になるように補正係数を調整