操舵ギヤボックスの剛性を上げても車体全体の剛性はイマイチ向上しなかったのだけど、
やっと原因箇所が一つ分かる。
操舵ギヤボックスに繋がるフロント部分のユニットの剛性不足っぽい。
構造上、操舵軸に掛かる負担を1.5m厚のカーボン板一枚で受けて、そこが歪んでいた。
操舵軸を2箇所で支えるよう(両持ち化)にしてみると、目に見えて捩れ剛性があがった。
RMCR 2016
RMCR2016春
春のルネサス大会に参加する。
今回は写真をとる余裕が無し。
予選はCMA-さんに追いつけそうにないと思っていたら、junさんはさらに速かった。
色々とマシンの設定を見直すもタイムが伸びず、お手上げ。
決勝トーナメントはベスト8でコース選択運のみで0.01秒差で競り勝つも、
その後はクランクが曲がれなくなり、そこまで。
追いつくには、全面的に見直しが必要そうである。
大会を運営してくださったルネサスの皆様や参加者の皆様。
楽しい時間をありがとうございました。
バンパー材質変更

バンパーの材質を変更する。
これまでの発泡スチロール製は経験的に2~3回ぶつかると壊れてしまう。そして今回は2回目で破壊。
ということで、CMA-さんから紹介頂いた発泡ポリプロピレン製に変えてみる。
重量は1.5g->3gと増えるが、信頼性というか故障時の手間を考えるとコッチが良さそうである。
短く止めるには
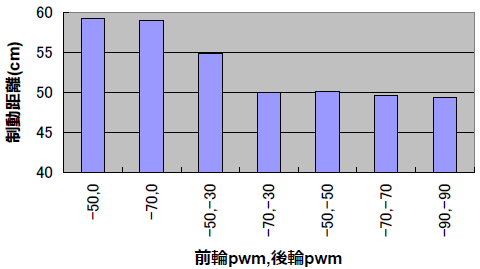
直線走行時の目標速度が高くなるにつれ、クランクでの減速が怪しくなってきた。
ということで、現状の減速時のPWM設定は妥当かを見てみる。
ちなみに、これまでは電力を使いたくないのと後輪が滑ることを恐れて、前輪-50%&後輪-30%でやっていた。
まず、前輪だけで止めてみると減速が遅く、PWMを変えようと変化無し。タイヤは滑ってなさそうだが、前輪のモータパワーだけでは足りなさそう。
次に後輪も使ってとめる。短くとまれるが、逆転ブレーキを強くしていってもあまり変化なし。-90%位になるとタイヤの跳ねるような音?が気になる。この辺になると2Gの減速なのでこの辺がタイヤの限度なのだろう。
ということで、減速時の最大逆転ブレーキを、(後輪が滑るのが怖いのを考慮して)前輪-70%&後輪-50%にしてみる。

やぐら剛性UP

年末にやっていた変更。
これまでの”やぐら”は断面形状が四角形になっていない場所が多くあり、
そこが捩れ剛性を低下させていた。
そこで、左右の面を繋ぐ部品を上下に延長して、断面が四角形のエリアを拡大してみる。
重量は0.1g増えたが、ねじれ剛性はだいぶアップした。
マイコンカーラリー技術交流会in科技高

神戸科学技術高校で行われた技術交流会に参加してきた。
近畿地区だけでなく東京や四国、九州からの遠征あり40人程度の参加者。
うち画処理クラスの参加は7台。
午前中は自由走行での試走が行われた。
天気のせいもあり気温が低くポロンタイヤの選択は間違いっぽいが
ログ上では特に問題ない。
冬用タイヤに切り替えたCMAさんの感触と違うので、
何時ものコースのグリップが低い状況であわせていたせいのようだ。
ついでに、大きく滑ってはいないのにコーナの速度も上がらず。
基本的に旋回中の駆動力が低めに設定していたようだ。
これは試走を重ねながら修正。
で、CMAさんが上手く走ると滅茶苦茶速く、
0.5秒以上はなされる。これは敵わない。
午後は2回走行のタイムアタックによる予選と
そして、

ルネサスK氏によるGR-PEACH画像処理マシンの紹介とデモ走行
その後、各部門上位4台によるトーナメント。
決勝では思いっきり離されるかと思いきや、
試走時からは想定できないレベルでタイムが伸び、いい勝負で2位となる。

明らかに変なので、その原因を探りたいが、
ログをとろうにもノートPCのバッテリが切れてしまい取得できず。
交流会を開催・運営して下さった神戸科学技術高校を初めとする近畿地区の皆様、
参加者の皆さん有難うございました&お疲れ様でした。
どうすんだコレ

八王子の帰りに発注し、Ni-Zn8本のバランス充電が出来る充電器を探し出し、
初期データをとった所で、2月3日のレギュレーション修正。
大半の大会はRMCRルール準拠なので、使用する機会がなくなってしまった。
福岡県マイコンカーラリー技術交流会
嘉穂総合高等学校で行われた交流会に参加する
参加者は四国からの遠征もあり20~30人?位
内容は

福岡県版マシンの製作と

コースを使用しての調整と記録会
年末頃から色々変えた部分の確認走行をするが、
良くも悪くも安定していて変化は分からず。
おつかれさまでした。