セラテックジャパンのWEBカタログで赤外線カットフィルタを購入する
物としては1cm角のガラス薄板になるが、それに対して梱包はかなり厳重にされていた。
抜き取り検査時と思われる測定データも同梱されている。
個人では入手しにくい赤外カットフィルタを少数・低価格で提供してくれるのは有難い
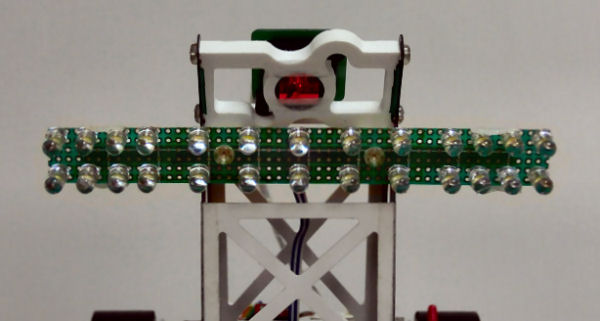
購入したのは[IRカットフィルター2]で、カメラM64285FPの分光感度のうち
白色LEDの発光色外である650nm以上をカットするようにした。
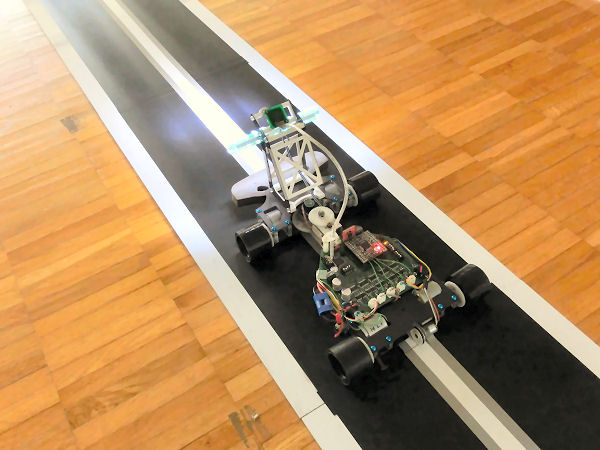
IR取り付けるべき向きは分からないので、とりあえずIR面をコース側にして取り付ける
なにがやりたいかと言うと
様々な光環境下でもカメラの出力がサチらないようにするために
太陽光のスペクトルを検出して絵が明るくなりすぎないようにしたい
よって、LED照明だけの時の絵の明るさから、変化が小さいほど良い。
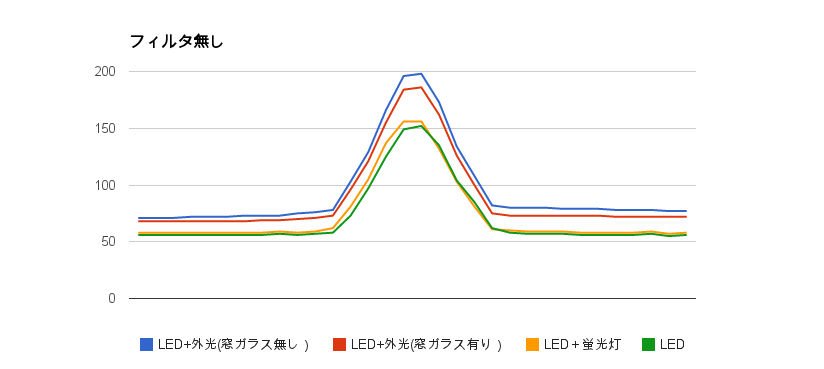
フィルター無しが↓で、
IRカットフィルタを付けると↓になる。
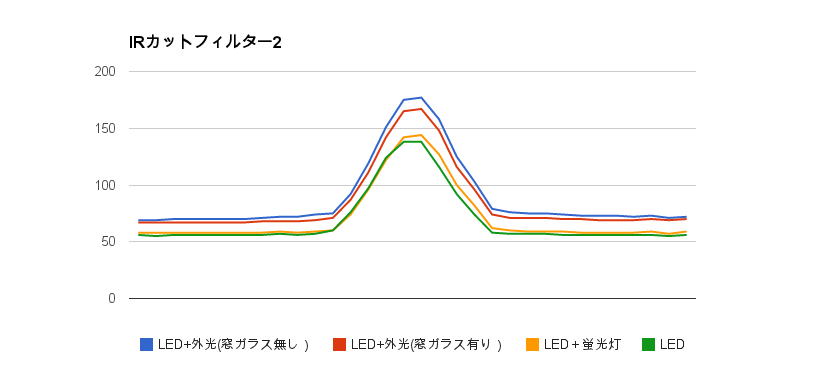
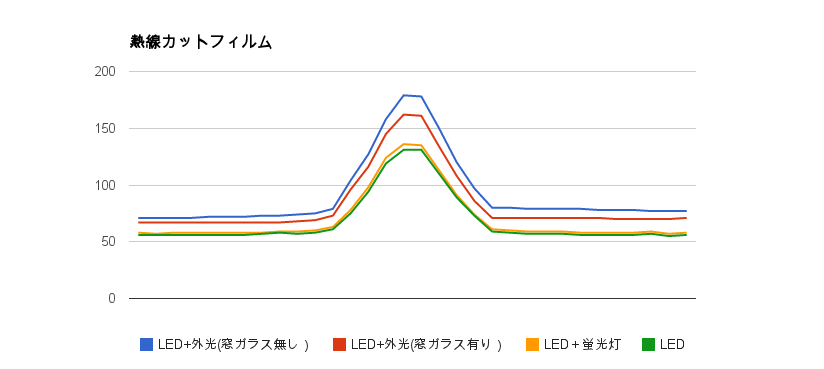
ちなみに、以前購入した太陽熱カットフィルムが↓
微妙に絵が暗くなるけれど、それ以外の差は分からない。
曇天(時折雨交じり)だったため太陽光が弱く、
赤外のスペクトルが低くなる傾向もあるようなので、
その辺の影響か?
//////////////////////
遅れていた参加手続きも完了。